|
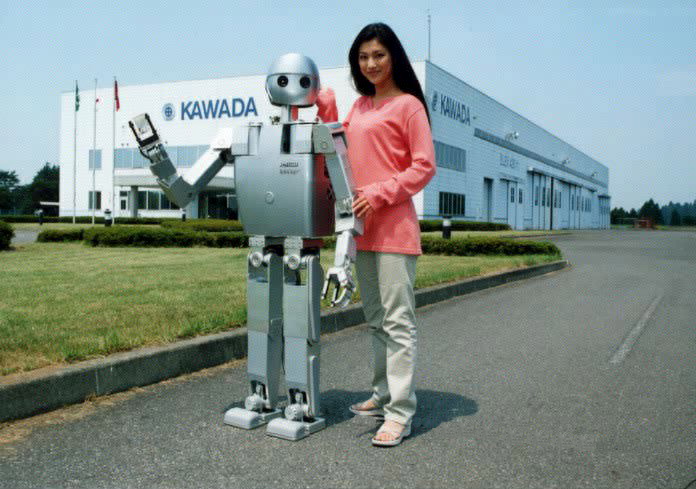
1. The
National Institute of Advanced Industrial Science and Technology (AIST)
of Japan in conjunction with Kawada Industries has now released the
HRP-4C humanoid.
This humanoid stands 1.58 meters tall (62 in) and weighs 43 Kg = 95
pounds. It can walk slowly and looks like a young lady. She
has 30 DOF and will sell for about 20 million Yen or $200,000.
Some videos are here.

 |
2.
Kokoro and Osaka University have developed a new life-like android called
Actroid DER3 (successor to DER2). These androids look very human and talk and
move their heads, arms, hands, and bodies.
DER2 (article link) (site link)
(youtube link)
DER3 (article link) (site link)
(youtube link)
 
|
|
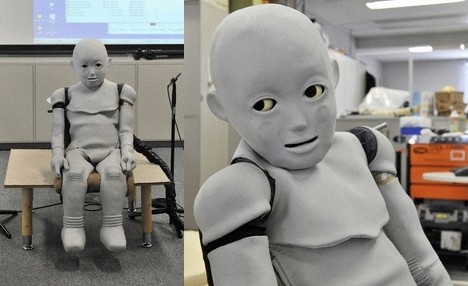
3. The
JST ERATO Asada project and
Osaka University
have built a child-sized android called CB2 (Child robot with biometric body).
It is 130 cm. tall, weighs 33 Kg., and has 56 DOF. It has cameras for eyes and
microphones for ears. It also has 197 tactile sensors embedded in the silicone
skin.
Android
page.
Link 1;
Link 2;
Link 3;
video 1;
video 2;
video 3;

 |
4. The Robot Cub
Consortium (11
European organizations) have built a very sophisticated child sized humanoid
called Robot Cub. This humanoid has 53 DOF, stands 104 cm tall, and weighs
22 Kg. More than 40 people at 11 institutions across Europe
have developed this humanoid. There are two
videos here and
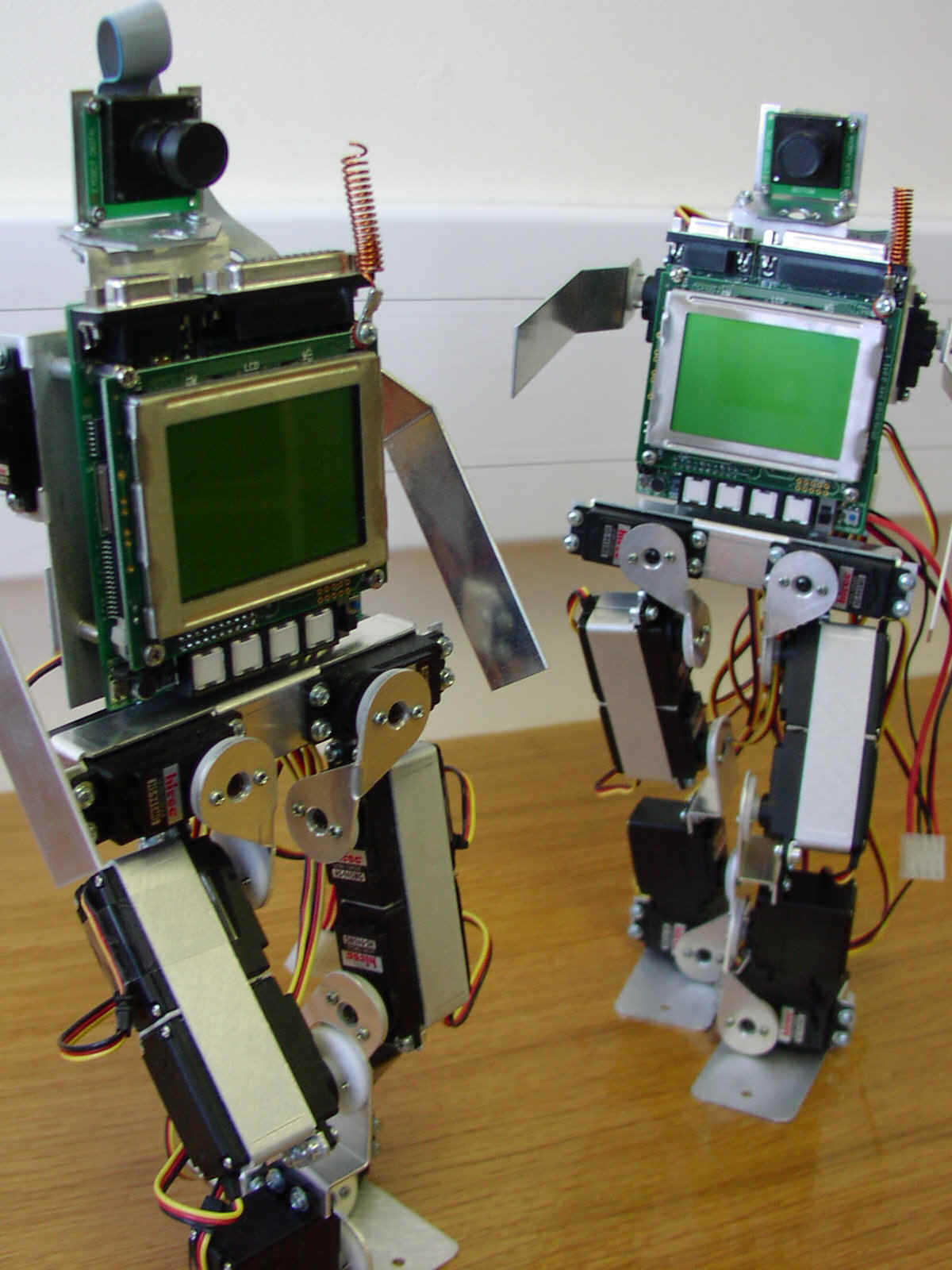
here.


|
|
5. KITECH (Korean Institute of Industrial Technology) has introduced
another android called EveR-3. She is 1.57 m tall (5'2") and weighs
135 pounds (60 Kg) and is capable of 16 facial expressions. She has 35 DOF
in her upper body.
(article link) (article link)
(youtube link) (youtube link)


EveR-3 |
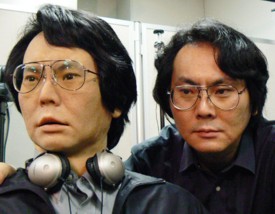
6a. Prof. Hiroshi Ishiguro of Osaka University has had a doppelganger
robot made of himself. Ishiguro is the same professor leading the
team which built the actroid (see below) and actroid DER and actroid DER2 (shown
above). This android has 46 degrees of freedom. There
are several videos available here. Another
news item is here.

6b. Doppelgangers are getting popular. Here is one of Zou Renti
(L) which was shown at the 2006 China Robot Expo held recently in Beijing.

|
|
7. Osaka University & Kokoro Inc. have produced an upgraded version
of the Actroid humanoid called
Repliee Q1 for the Expo
2005 World's Fair which is now going on in Nagoya, Japan.
Repliee Q1 has silicon skin and looks very human as she sits and
gentures to you. This robot has 41 DOF (versus 31 for Actroid).
 <= Repliee Q1
<= Repliee Q1
|
8. Another Korean group at KITECH has produced an android which is very
much like Repliee-Q1. It is called EveR-1. It
is about 1.6m tall and weighs about 50 Kg. The
team, headed by Baeg Moon-hong, a senior researcher at the Korea
Institute of Industrial Technology, Thursday (5/4/06) took the wraps
off the female android, named EveR-1, during an exhibition at the Seoul
Education Culture Center. Baeg, who spent just 3 billion Won (3.16M USD)
in creating
EveR-1 in a year, is looking to exceed his Japanese rivals by making the
model move four limbs by late this year.


EveR -
1 KITECH
|
|
9.
New Asimo humanoid Honda has introduced their updated Asimo humanoid.
It is 130 cm tall, weighs 54 Kg = 119 pounds, and has 34 DOF. Here
is a nice video.

|
10. Here is
Aiko a very
anthropomorphic humanoid built by Le Trung (Brampton, ON, Canada).
She currently has 23 DOF of which 10 are in her fingers. In future
she will have 12 more DOF. She is 1.52 m tall, but cannot
stand up by herself yet. Trung has some videos
here.
Great job in only one year!


Aiko
with Trung |
| 11. Kokoro Dreams and Osaka University announced a sitting android
Nov 19, 2003 at the International
Robot Exhibition 2003 in Tokyo. This android is
called Actroid
and it is VERY realistic. Actroid specification:
The system consists of three separate units: Humanoid part: Height = 1.3m; width = 0.42m; sitting
length = 0.725m; weight = 30 Kg. The android has 31 DOF. It
operates on compressed air and electricity (120w). Control unit: Height = 0.6m; width = 0.75m; length = 0.6m; weight = 40 Kg; contains
main computer. Compressor unit: Height = 1.37m; width = 0.9m; length = 0.9m; power consumption = 3.7 kw;
noise < 50 db.
|
Here is a movie of
Actroid. Here is another article about Actroid.


Actroid
with friends.
|
|
12. China has introduced a singing android called Dion. While it
is not nearly as advanced as the Actroid shown above, it is very
life-like. It is a life-sized standing android with a very womanly
shape. Story
and video are here.

|
13. The Institute of Automation
of the Chinese Academy of Science in Beijing introduced a new female
humanoid called Rong Cheng on August 7, 2006. This humanoid is 168 cm tall and weighs
60 kg. The primary designer was Yue Hongqiang and his team took one year to build this
humanoid at a cost of $37,500 (300,000 Yuan). Rong Cheng will be sent to Sichuan Science Museum
in Chengdu where she will be a receptionist and tour guide for the museum.
Article
Article
Video (Quicktime)


|
|
14.
KIST
has just introduced the Mahru-Z robot maid (2010). It is 130 cm.
tall, weighs 55 Kg, and has 3 fingers on each hand. It has 35 DOF. Link
1;
Link
2;
Link 3; video 1;
video 2;

 Z (right)
Z (right) |
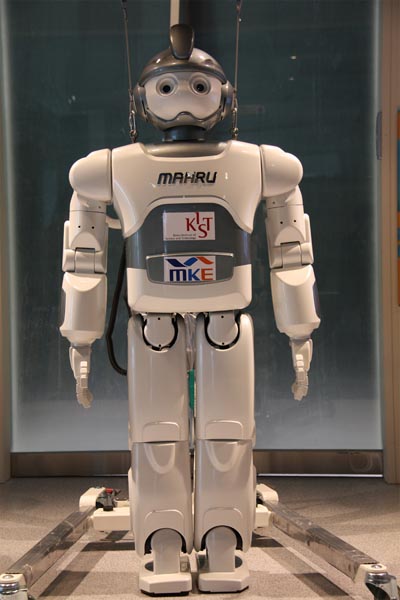
15.
KIST
introduced the Mahru-R in 2009. It is 145 cm. tall, weighs
67 Kg., and 35 DOF and has 3 fingers on each hand and walks at 2.6
Km./hr.
Link 1;
video 1;
video 2;

|
|
16.
KIST
introduced the Mahru-M in 2008. It is about 150 cm. tall, weighs 62
Kg., and rolls around on wheels. Probably 20 DOF.
Link 1;
M (left)

|
17. Choromet (HRP-2m) is a fancy toy humanoid.
It is 35 cm. tall, weighs 1.5 Kg., and has 20 DOF. Its cost is
about 500,000 yen ($4,400). Choromet
can lie down and stand-up by itself. It can also stand on one
leg. It uses a Linux
operating system. Choromet was developed by
Japan Advanced Industrial Science and
Technology Institute (AIST)
and 4 private companies.
Link 1; video
1;

|
|
18. E-nuvo is a 126 cm. tall humanoid built by
Nippon Institute of Technology.
It weighs 15 Kg., and has a total of 21 DOF.
It uses
Lithium Ion battery power. Link 1; video 1;

|
19. ATOM-7xp is a new humanoid (January 2010) developed by
Dan Mathias at FutureBots over the last 8 years. It is 158 cm. tall, weighs 73
Kg., and has 49 DOF
(including 10
for the head and 10 for the hands).

|
|
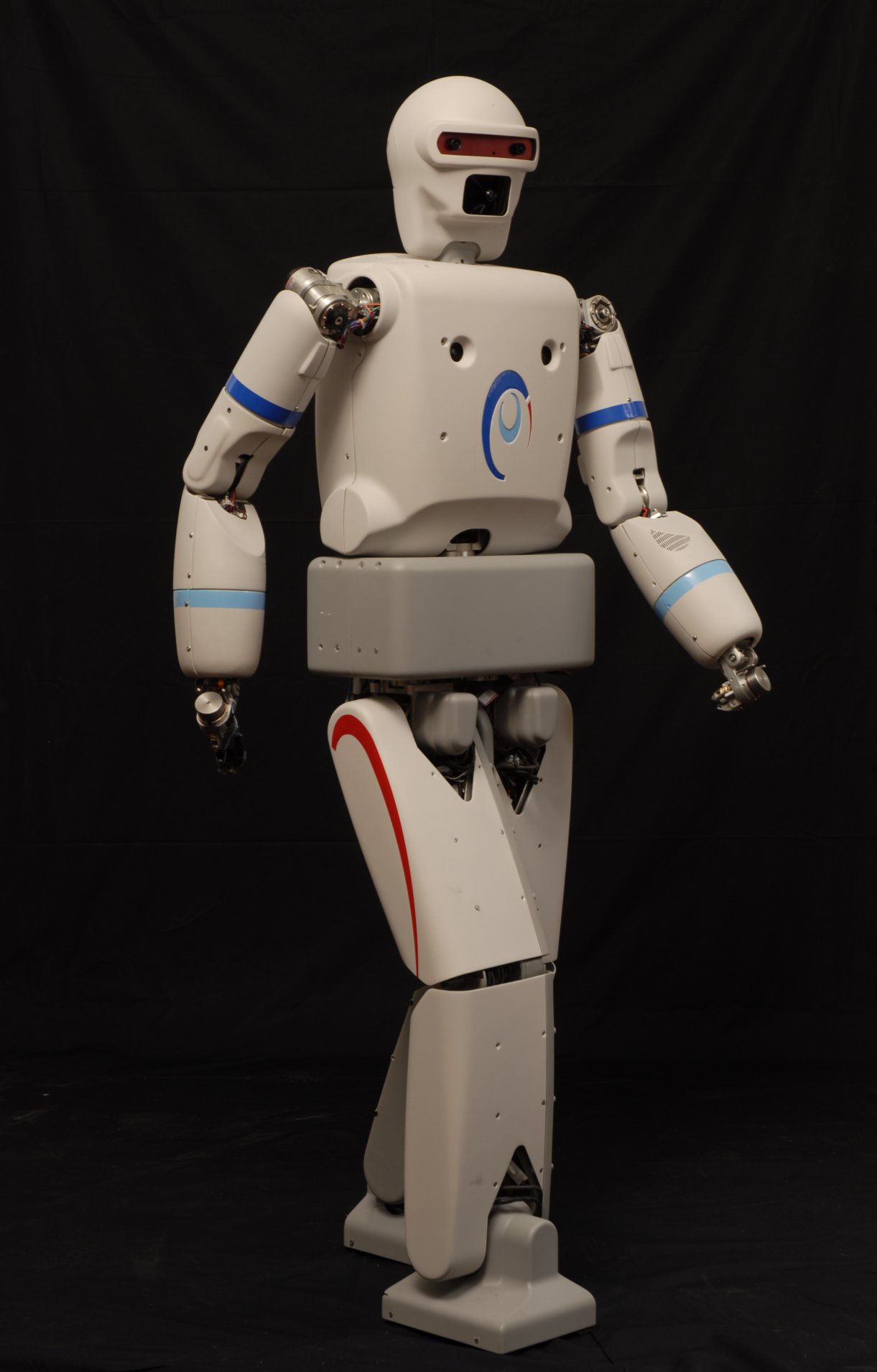
20. Pal Technology of the UAE
(United Arab Emirates) has announced a very sophisticated new humanoid called
REEM-A. It stands 1.45 m tall, weighs 41 Kg. and has 30 DOF (Degrees
of Freedom). Their specification is
here. There are some nice videos
here.

|
21. Kawada has now released the HRP-3P humanoid. This robot stands
160 cm tall and weighs 65 Kg. It has a total of 36 degrees of
freedom. Kawada's
HRP-3P page is here (in Japanese of course) Here
is an article from Engadget. Here is the full
HRP-3P specification with lots of nice pictures. Here
is the AIST press release.


|
|
22. Tmsuk of Japan has
produced a new robot which they call Kiyomori. They have their own
website with videos here. Kiyomori is presented as a Samurai
warrior. This video from Youtube shows
it walking.

|
23. JVC has released a new small humanoid robot called J4.
It stands 20 cm tall and weighs only 0.77 Kg but it has 26 degrees of
freedom. Here is a nice
presentation from Plyojump.


|
|
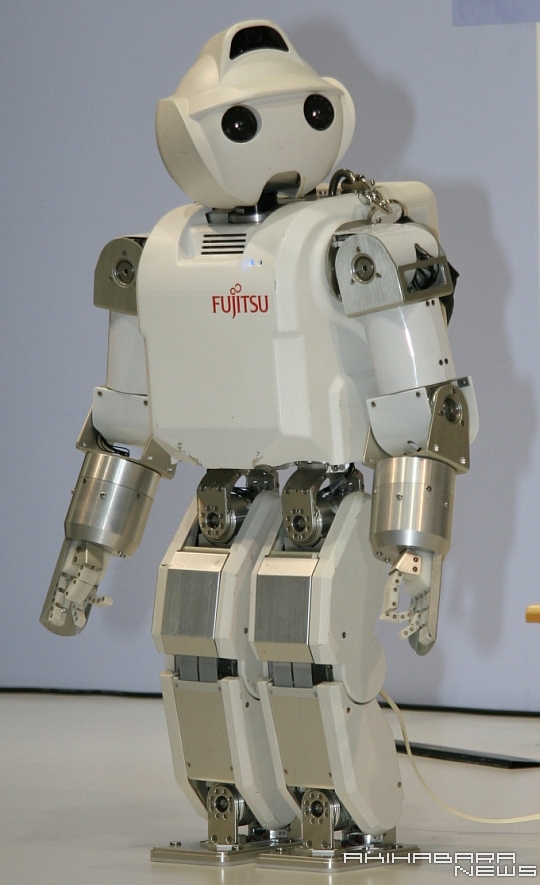
24. Fujitsu has now released the HOAP-3.
This small humanoid stands 60 cm tall and weighs 9 Kg. Here
is one article. This humanoid has 28 degrees of freedom and uses a 1.1
GHz pentium processor running RT-Linux.


|
25. A British group has produced a performing robot
called Robothespian.
This project began in January of 2005. Robothespian has about 30 DOF, stands 175 cm tall
(plus 18 cm stand) and weighs 33 Kg. This robot actor is now
available for 55,000 pounds (US$ 85,000, or 7.9M Yen).
There are two videos here
and here.


|
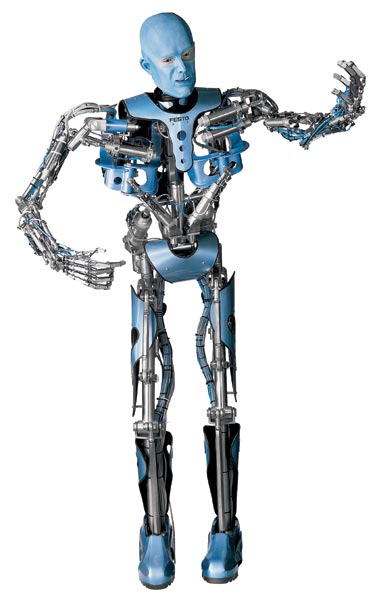
| 26. Fesco, the pneumatics experts, have built a huge
android called Tron X. This android stands about 2.8 m (9
feet) tall and weighs about 300 Kg (660 lbs). It is operated by
over 200 pneumatic cylinders of all different sizes. Aparently
this android was built in Australia in 1997. Perhaps the
current model is a second version??


Tron-X - 200+ DOF
|
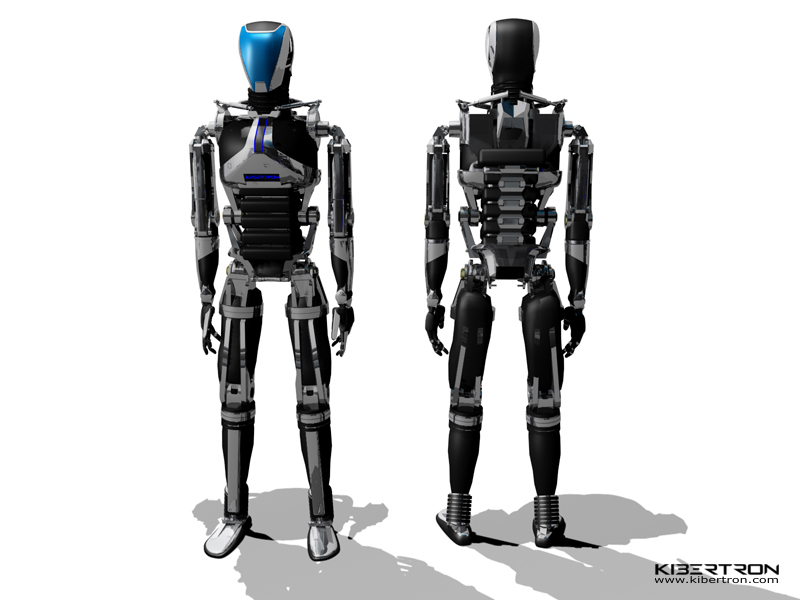
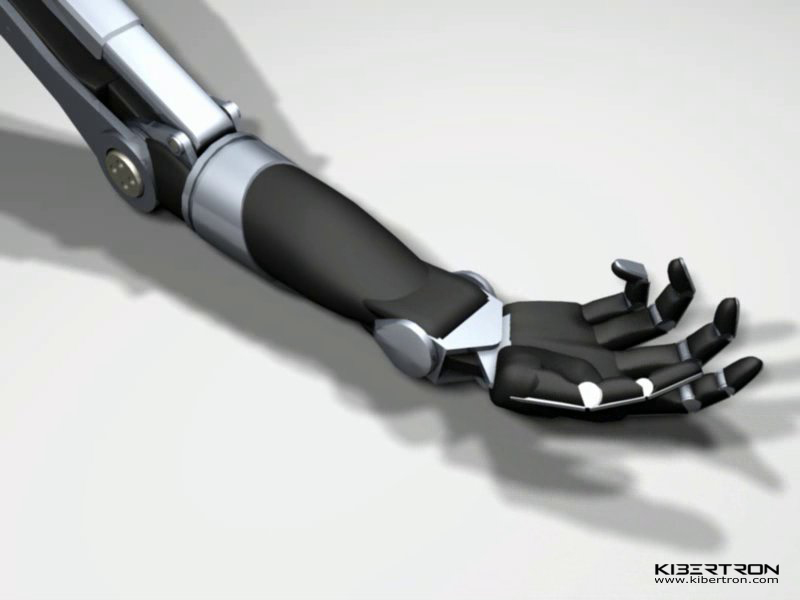
27. A company called Kibertron Inc, located in
Sofia, Bulgaria has a full scale humanoid project called Kibertron.
Their humanoid looks like a terminator. It is 1.75m tall (5' 9") and
weighs 90 Kg (200 pounds). They
have a staff of 23. Kibertron has 82 DOF - that's a lot.
The hands have 20 DOF each and the arms have 8 more DOF for a total of
28 for each arm & hand. Here
is their project outline.


front &
back arm
& hand
|
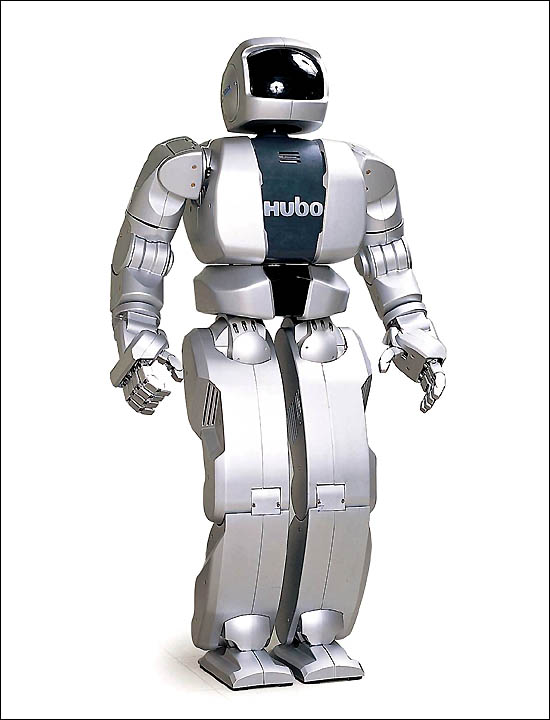
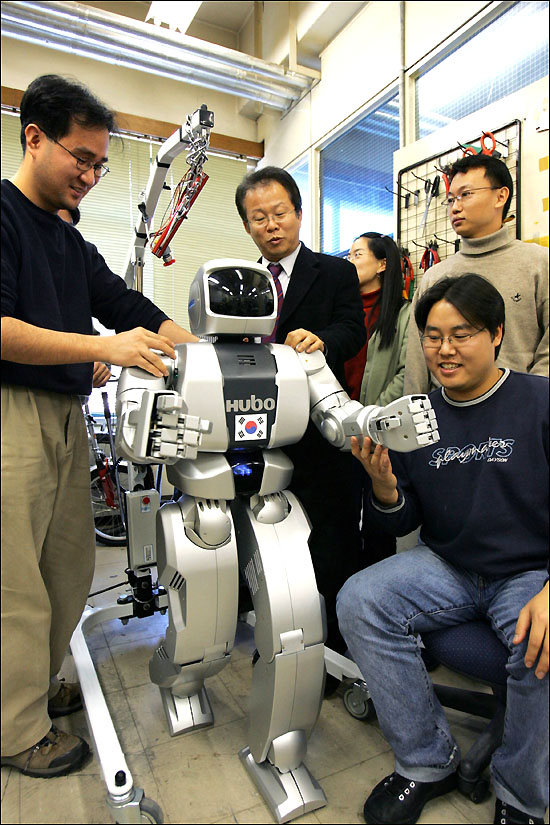
| 28. KAIST announced
January 6, 2005, a new humanoid which they call HUBO.
The project leader is Professor Jun-ho Oh, who has also been named
"KAISTian" of the year. Their humanoid has 41 DOF,
stands 1.25m tall (49") and weighs about 55 Kg (121
pounds). Their android can walk, talk, and understand
speech. This robot walks at a rate of 1.25 km/hr. Clearly Korea
is catching up in the world humanoid development race.
This group is located in Daejeon, Korea.


Hubo
walking
Hubo can move his fingers independently (whereas ASIMO cannot).
Here are a couple more articles: Chosun
News and Theautochannel.
|
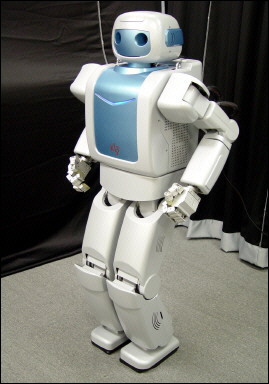
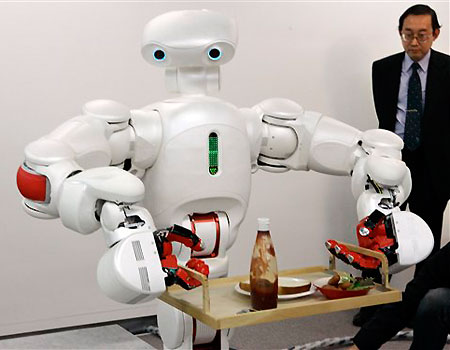
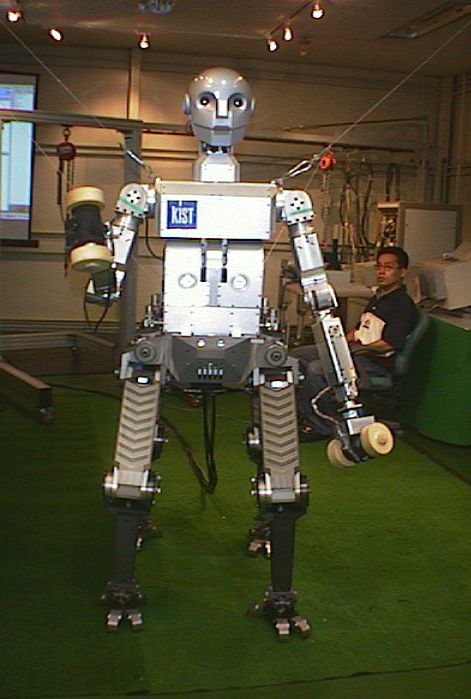
29. KIST has built two
humanoids called Mahru
(male) and Ahru (female).. The development team is lead by Bum-Jae You. This group
claims their humanoid is the world's first network-based
humanoid. It thinks like a human and learns like a human. It
stands about 1.5m tall (60") and weighs about 67 Kg (147
pounds). It can walk, talk, and understand speech. It
walks at 0.9 km/hr. It has 35 degrees of freedom. The
team are now working on Mahru II which will be released in
2009.


Mahru
Mahru II
|
| 30. September 10, 2001 Fujitsu Laboratories Inc
announced their toy android called HOAP-1, an 18" tall
13 pound android with 20 degrees of freedom. The cost is $41,000 or
4.8 million Yen. Now they have announced another
android called the HOAP-2. Its about the same size.


HOAP-1
HOAP-2
|
31. On Sept. 19, 2003 Sony announced another small
humanoid called QRIO. Its quite similar to the SDR-4X.
It can walk better and can recover from falls better.
 QRIO
QRIO
|
| 32. Sony introduced the SDR-4X for Robodex 2002. Great new
android to compete against the HOAP-1. Movies. Many pictures. Article &
more pictures. 
|
33. Kawada Industries Inc. has introduced the HRP-2P
for Robodex 2002. This
humanoid appears to be very impressive. It is 154 cm (60") tall, weighs 58kg (127
lbs) and has 30 DOF. Here is a news
release (in Japanese). Notice the LACK of a battery pack. Here is a new
story about HRP2. There is a new
link to some videos of HRP-2 in action.
 
|
| 34. A dental training robot called Simroid has been
introduced by Dr. Naotake Shibui, of the Nippon Dental University
in Tokyo, who collaborated with technicians at Kokoro Co. to develop the
robot. It looks very human and even
squeals in pain when the trainee makes a mistake.
 Simroid
Simroid |
35. Toyota Motor Company has now introduced a
humanoid that can play the violin. This shows an improvement in the
dexterity of the fingers. This robot stands 1.52 m tall and it has 17
joints in its arms and hands.
Video of robot playing "Pomp and
Circumstance #5" by Elgar is here.

|
| 36. Toyota Motor
Company announced their long awaited SUITE of androids on March
11, 2004 in Tokyo. They plan 4 models (shown on this and the
next 3 entries) They are called partner robots and are designed
to function as personal assistants for humans. The first one is the
walking version. This android is 1.2m (4') tall and weighs 35 Kg
(77 lbs). It is intended to assist the elderly.

Japanese page
|
37. Toyota plans to show their androids for the first
time at the EXPO
2005 Exhibition of Global Harmony which will take place next year
(from March 25, 2005 to September 25, 2005 in Aichi, Japan. The
second model is the
rolling version. This humanoid rolls around on wheels but has a
human-looking upper body. It is intended for manufacturing
purposes. It is 1m (40") tall and also weighs 35 Kg (77
lbs).

Japanese page
|
| 38. Toyota's third model is easily the most
unusual robot of the group. This model is called the mountable
version. It is basically a chair which can WALK!
WOW! What a concept! It stands 1.8 m (6') tall and weighs
75 Kg (165 lbs). Notice that the person in the chair is wearing a
crash helmet. One hopes that the helmet will not be necessary.

Japanese page
|
39. The fourth model being produced by Toyota is a wire-operated
version. No data were given about its size or weight.
It is lighter than the others and can move more quickly. Toyota has
movies of their robots in action on their site.

Japanese page
|
| 40. Two
new humanoids called ARNE and ARNEA were announced August 5, 2003 in
Russia. They were built by a St. Petersburg company called New Era
and students from the St. Petersburg Polytechnic University. These
humanoids stand 1.23 m (4') tall and weighs 61 Kg (134 lbs). They have 28 DOF. The
project, lead by Alexander Yakovlev of the Robot Technical Sector of
New Era, has been running for two years.

|
41. Kawasaki Heavy Industries, Tokyu Construction Co.,
Ltd., National Institute of Advanced
Industrial Science and Technology ("AIST"), and Honda
have a new project called HRP-1S.
The humanoid was built by Honda and the control software was developed
by the AIST. This article shows the humanoid operating a
backhoe. We assume the humanoid has the same number of DOF as Honda's Asimo or P3.

|
| 42. Beijing Institute of Technology
has another humanoid project now which is called BHR-2.
This humanoid is called �Huitong�,
the child. It is 160 cm tall and weighs about 63 Kg.
Little other information has been released, but we assume at has at least
32 DOF and was probably developed by the same group who developed BHR-1.
 BHR-2
BHR-2
|
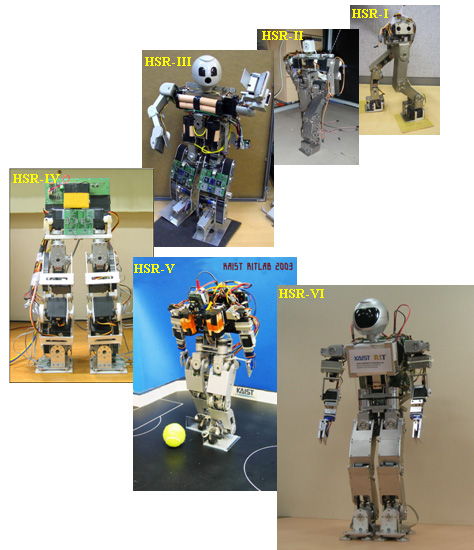
43. KAIST has another major humanoid development effort at the RIT (Robot
Intelligence Technology) laboratory in Daejeon, Korea.
The project leader is Professor Jong-Hwan Kim. They have about 15 people
working on the project and they have built a series of 6 or 7 humanoid robots
the latest of which is the HSR-VI also called HanSaRam.
It has 25 DOF consisting of 12 DC motors and 13 servo motors.
 HSR
HSR
|
| 44. Beijing
Institute of Technology has a big humanoid
project called BHR-1. This android is 1.58 m (5' 2") tall and weighs 76
Kg (167 lbs). It has 32 DOF. It can walk at 1 km/hr with 33 cm steps. The
project leader is Prof. Li Kejie.Other staff include Qiang Huang,
Yuechao Wang, Min tan, Tianmiao Wang and Jinsong Wang. This
android appears to be very advanced and also similar to several of the Japanese androids
shown above.
 BHR-1
BHR-1
|
45. The Aircraft and
Mechanical Systems Division of Kawada Industries Inc. built the H7 android for Univ of
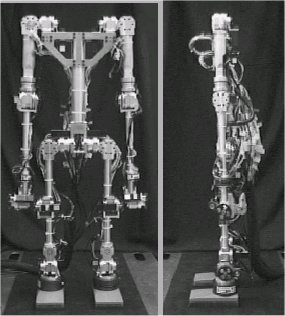
Tokyo. They have now started a project of their own using some of the same technology from
H6 & H7. Its called Isamu. 

Isamu is 1.5 m (5') tall and .6 m wide and weighs about
55 Kg (121 lbs).
It has 32 DOF and you can see that the head is more anthropomorphic than H6 or H7.
|
| 46. ECCE robot (Embodied
Cognition in a Compliantly Engineered Robot) is an unusual humanoid in that the muscles and skeleton are
modeled after our human skeleton and muscles. It was built by a consortium of
universities including the University of Essex, University of Sussex,
University of Zurich, University of Belgrade, and University of Munich, and
The Robot Studio . It is a
spin-off of the Cronos project. It has 80 DOF. It was introduced August 11,
2009.
video 1;
video 2;

|
47. Kawada Industries introduced the
NEXTAGE assembly robot on November 19, 2009.
It is very well designed a nd looks great. It has 15 DOF and can lift payload of 1.5 Kg.
video 1;
video 2;


|
|
48. The University of Tehran (Iran) has introduced a nice robot
called Surena-2. This robot looks like numerous robots in this list.
It is 1.45 m tall and weighs 45 Kg. It has 22 DOF (12 in its legs, 8
in its hands, and 2 in its head). This robot follows a very primitive
Surena-1 which had only 8 DOF. Surena-2 took over 10,000
man-hours of effort to complete. (article link) (article link)
(article link) (article link)
 Surena II
Surena II
|
|
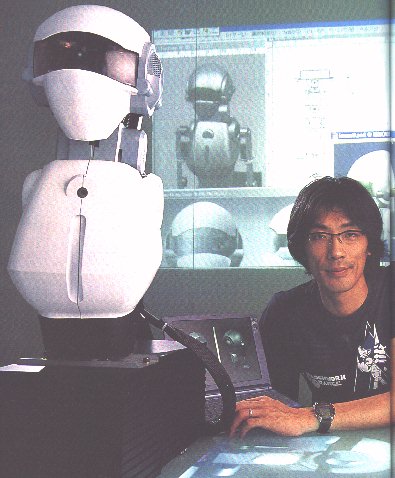
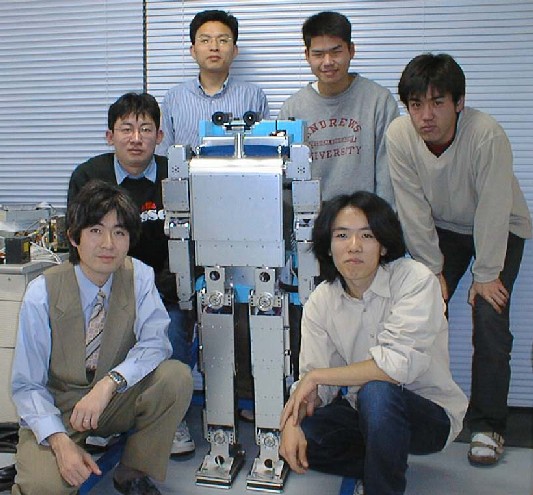
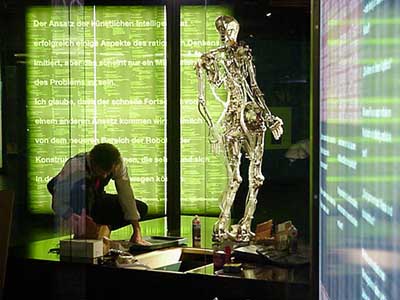
| 49. Hiroaki Kitano of Kitano
miotic Systems (Tokyo, Japan) which is a subsidiary of Japan Science and Technology
Corp (seethe entry on the left - #11) which is in turn funded by the Japanese government
is building an android wich he calls SIG (Symbiotic Intelligence Group). The photo below
shows SIG and Tatsuya Matsui. Kitano has challenged the world of android
builders. He believes that his android will be the archetype.
We shall see about that. By the way, they are looking for
people to join their project.  
Matsui-san and SIG
|
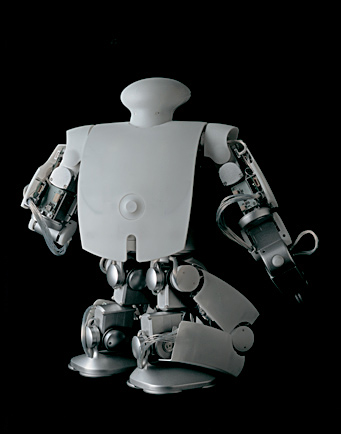
50. Hiroaki Kitano of Kitano
Symbiotic Systems (Tokyo, Japan) which is a subsidiary of Japan Science and Technology
Corp which is in turn funded by the Japanese government is building an android baby called
Pino. Pino has 29 motors and stands about 75 cm (30") tall and weighs 8 kg. Here is a link to a
Time Magazine article. A
new Pino link
I recently found. WOW! Kitano is now giving away software and hardware
designs which were used for Pino. Just go HERE and sign up.
 Pino - 8KB
Pino - 8KB
SIG design link
PINO design link. |
| 51. Kitano now has another small android called Morph3.
It is 38 cm tall (about
15 inches), has 30 DOF and weighs about 2.4 Kg = 5.3 pounds. It is also using Bluetooth
communications.
 
Morph3
|
52. Early in October of 2001, Kitano Symbiotic Systems
announced another project called "Morph". Morph uses the Bluetooth wireless communication protocol to pass
commands to the android and to send feedback from the android back to the main computer. Here is another article.
Murata is a co-developer in this project. Morph has 26 DOF and stands about
13.6" (35cm) tall. My best source, Gianluca sent me some links with pictures.
 
|
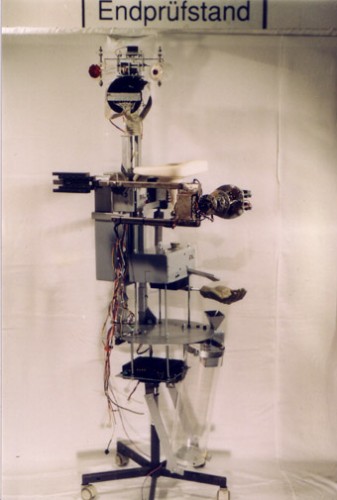
| 53. The Electrotechnical
Laboratory in Tsukuba, Japan is building a humanoid at
the Humanoid Interaction Laboratory under the direction of professor Yasuo Kuniyoshi.
Their humanoid is called Jack, Their android has cost way over $1,000,000 - and its
still not finished yet. Jack was also featured in this month's Wired Magazine article about Androids.
(Sept. 2000, pgs 252 - 272). The legs are just barely visible in the
background. Gordon Cheng just sent me another picture of "Jack" and a link to a nice article. Jack
has 46 DOF.  
|
54. Tohoku University now has another project called "Saika3".
This android looks alot like the Honda androids. It is 1.27m tall and .5 m wide and weighs
47Kg. Saika3
has 30 DOF 
Saika-3 Group
|
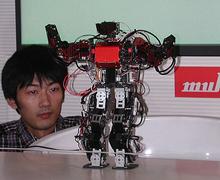
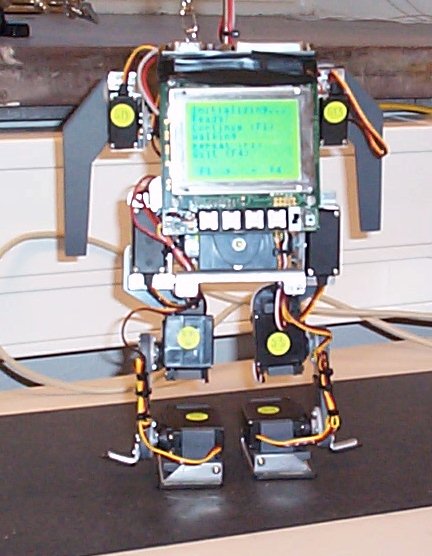
| 55. Jouhou System
Kougaku laboratory at Tokyo University has a new project called H7.
Its another biped similar to H6. Another
H7 link. (<=New link)


H7 is clearly very similar in size and capabilities to H6. They have an
18Meg video of H7 walking at the Kawada Industries airport where the above pictures were
taken. |
56. Jouhou System
Kougaku laboratory at Tokyo University has a project called H6.
Its similar to H5.  
H6 is 1.37 m (4'6") tall, about .59 m (23") wide, and weighs 55 kg (121 lb).
It has 35 DOF.
Note: Saika and H5 have been moved to the Historical
Android Projects page. |
| |
|
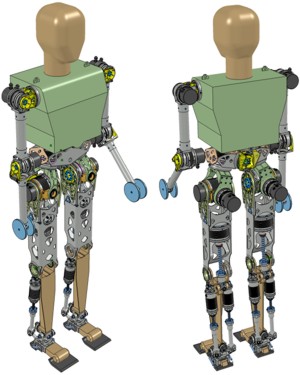
| 57. There is now a second major project at the
Technical University of Munich (TUM)
- called LOLA.
This humanoid will have 22 actively driven DOF The legs have 7
DoFs each, while the upper body has two and each arm has four.
 LOLA
LOLA
|
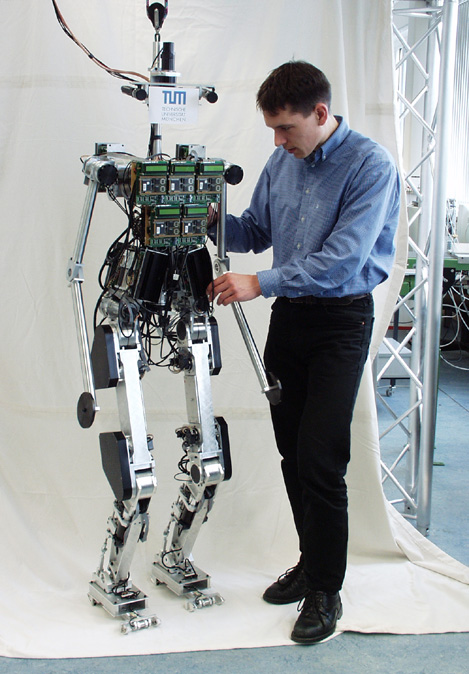
58. There is a big android project going on at
Institute for Applied Mechanics at the Technical University of Munich (TUM).
Their android
is called "Johnnie" and it can already walk. They are now trying to make it RUN.
This means there are two major projects in Munich. Johnnie was on display at the Hannover
Fair this spring. They have two videos on their site. 
|
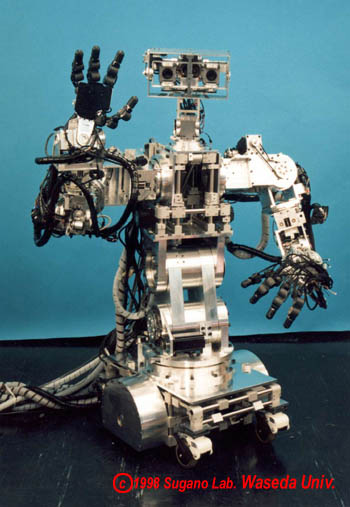
| 59. Here is another project
called TwendyOne
from the Sugano Lab
at Waseda University
in Tokyo. The big advance in this humanoid is its very
sophisticated hands with fingers which have tactile sensors.
The humanoid has 47 DOF and stands 1.47 m tall and weighs 111 Kg.
They have a couple of movies
here.

Twendy One
|
|
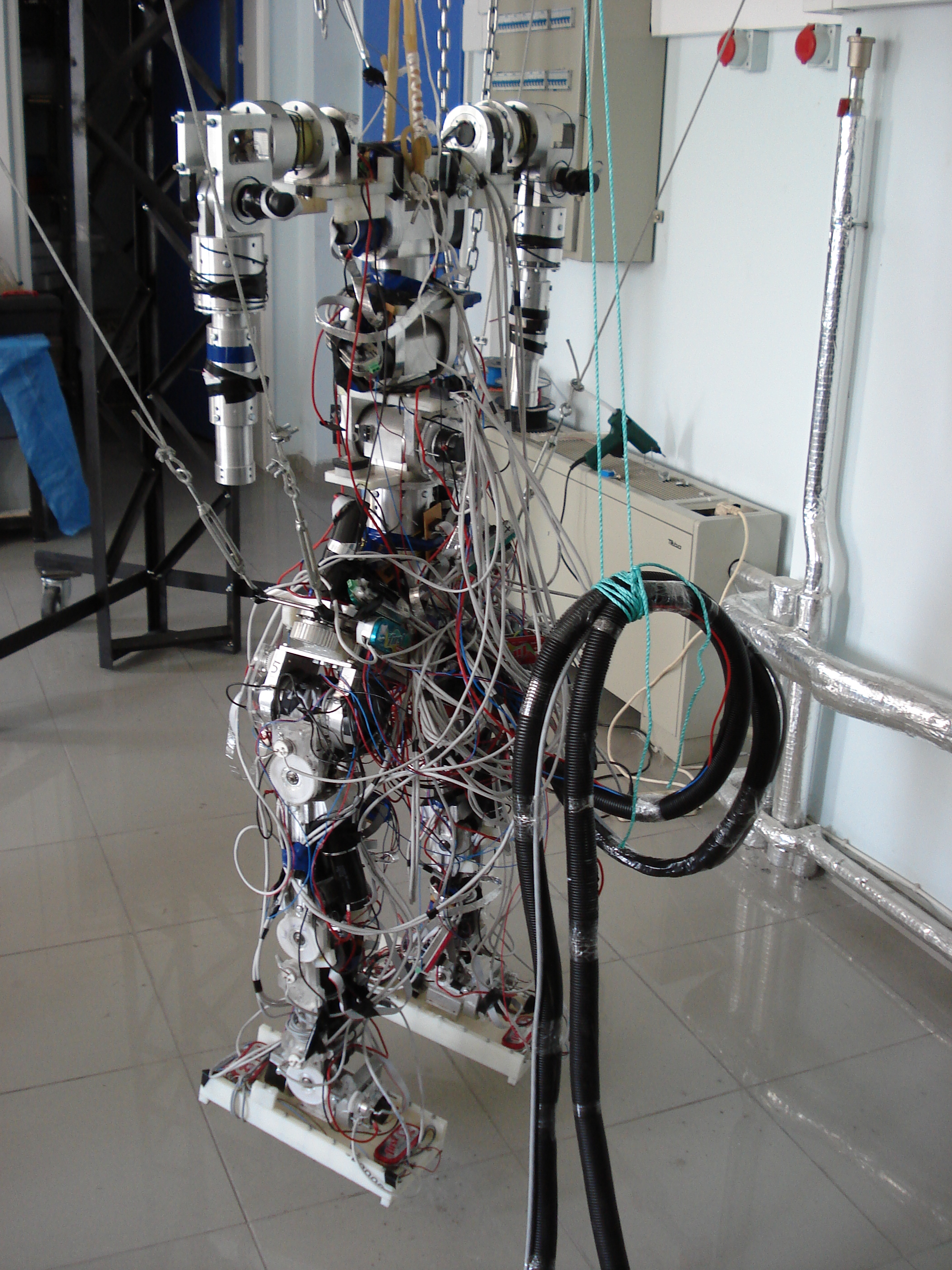
60. I received an email from Dr. Davut Akdas. He has built the
first humanoid in Turkey at Balikesir University in Northeastern Turkey.
His humanoid is called RoboTurk. It has a total of 23 DOF including 12 DOF in
the legs, 5 DOF in the body and 2 DOF in the arms.
The weight is 55 Kg and the height is 150 cm. His humanoid can walk forward,
backward, and sideways. It can even climb small
steps. Wow! Great job!


|
61. Prof. Gordon Wyeth and several of his students have started a project
called GuRoo (for Grossly
Underfunded Roo) at the University of Queensland,
in Brisbane, Australia. GuRoo will have 23 degrees of freedom
and will stand 1.2 m tall. Its projected weight is 30kg. Guroo participated in the recent
Robocup 2002 in Japan. The
team has 6 people. One of the team members, Damien Kee, has posted some
videos of their android taking its first tentative steps. Neat!

|
| 62. Japan Science and Technology Corp
(Kyoto, Japan) has recently revealed a 5 year
project to build a humanoid robot. This project began in October of 1996. The project
leader is Dr. Mitsuo Kawato and they have a staff of about 18. Their humanoid robot is
called DB (see below).
 32KB image
32KB image
|
63. The Technical University of Darmstadt has a humanoid project underway now.
Their humanoid is called Lara. It is 130 cm tall and has 18 DOF which consist of 38 Nitinol wire
muscles. The team leader isProfessor Oskar von Stryk and they have about 15 students working on the project.
 Lara
Lara
|
| 64. The Shadow project
(London, England) This group is developing a humanoid bipedal walking machine.
They also have several products for sale. Their staff includes about 14
people. Below is an image of their bipedal walker.
 208K 208K |
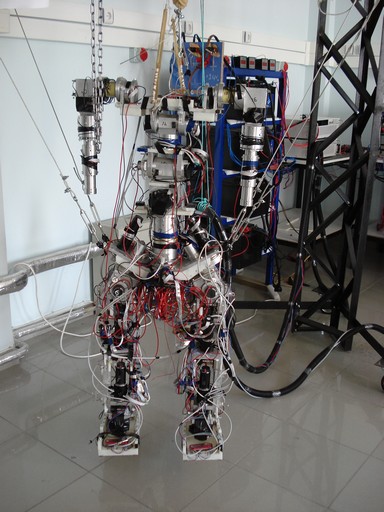
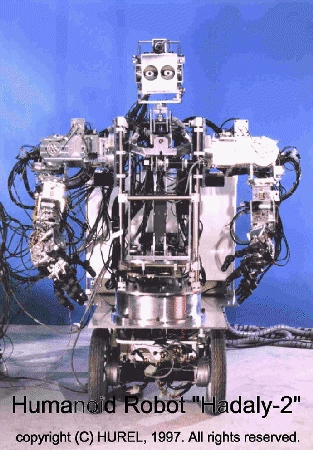
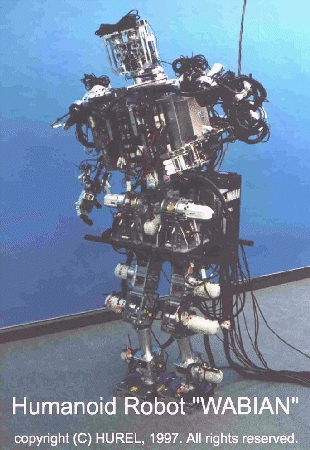
65. Waseda University
Humanoid project (Tokyo, Japan) Their android is about 6 feet tall and weighs over 600
pounds. It can walk, but just barely. Both this
android and Honda's android were featured on the PBS program called "Robots
Rising" which aired three times in March, 1998. The Waseda Humanoid project is
composed of six groups:
Below are images of Hadalay-2 and Wabian.


|
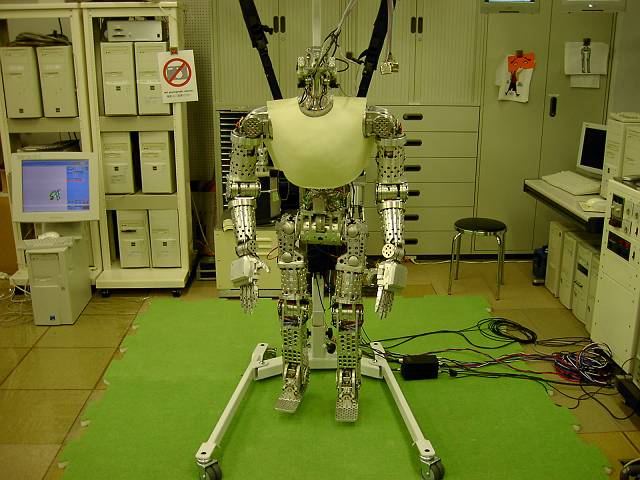
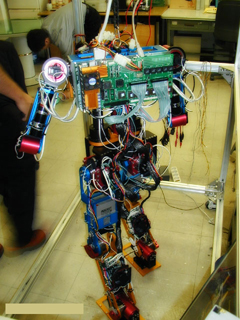
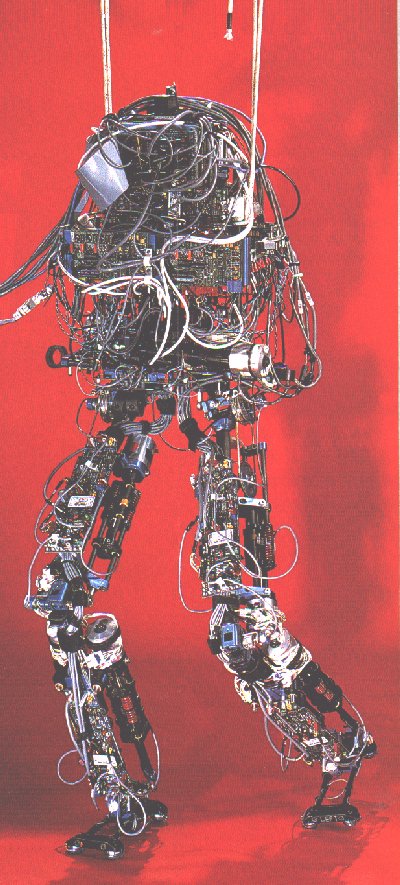
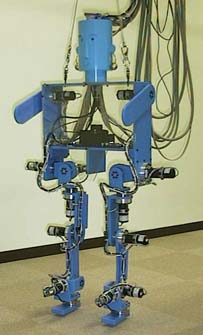
| 66. National Institute of Advanced Industrial Science and Technology in
Tokyo (AIST) supports 15 research institutes throughout Japan including the 8 in Tsukuba
Science City north of Tokyo. They are sponsoring a humanoid project which was begun in 1998.
They actually have a large number of
projects. 

Above we see a P3 and on the right are the legs of HRP learning to walk.
|
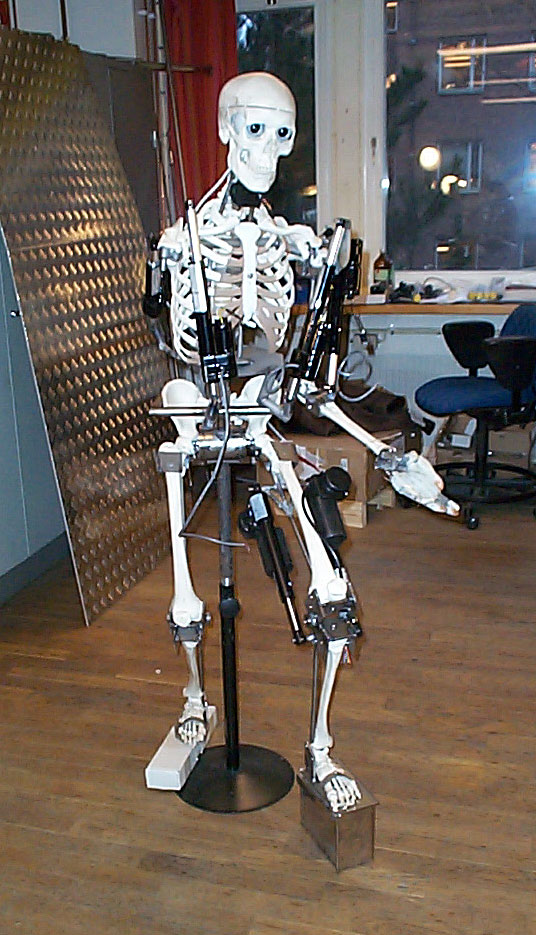
67. Chalmers University also
has a full scale android project called Priscilla which was started in
the summer of 2000. She is based on a full sized skeleton of a human. She will be powered
by hydraulic cylinders. You can see that she has binocular vision.  Priscilla.
Priscilla.
|
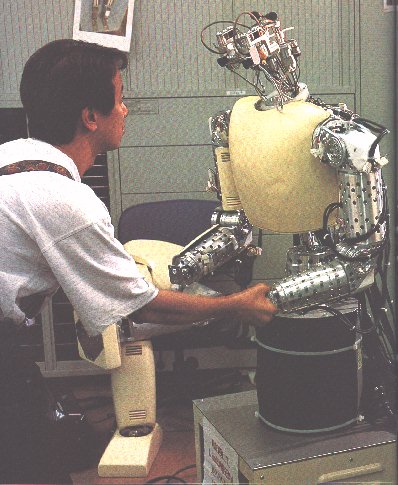
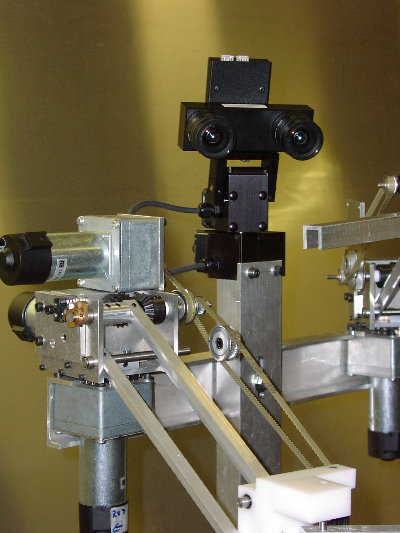
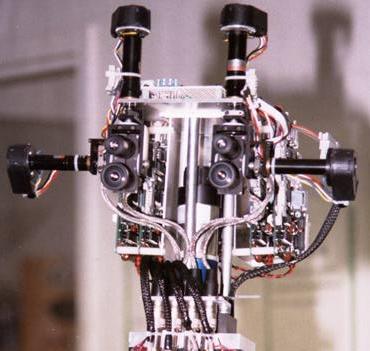
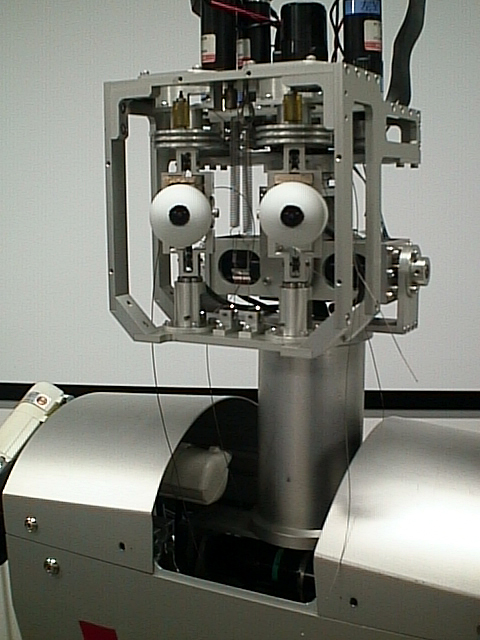
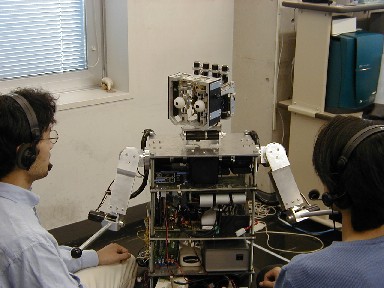
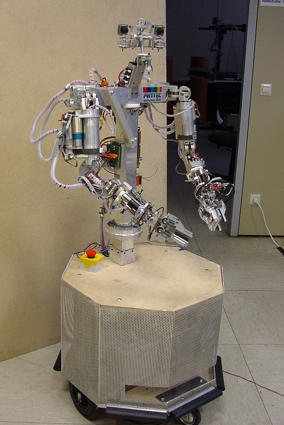
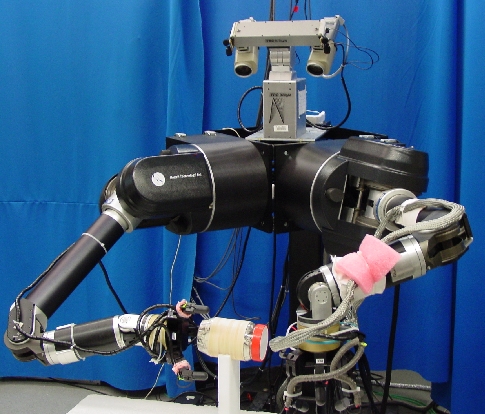
| 68. The University of Tokyo
has a big project called Telesar2.
It consists of two major systems: 1. The anthropomorphic
upper body with arms and head mounted on a rotating tower. and
2) a control system which has several monitors and two hand controls
which the human operator wears on his/her hands. This seems
quite unique. The hands seems to be very high quality. The
project is lead by Dr. Tadakuma of the Tachi Lab of the graduate
school of Information Science and Technology at the Univ of
Tokyo. They have lots of videos on their site. They
exhibited their systems at the World EXPO 2005 in AICHI, Japan from
June 9 to June 19, 2005
 Telesar 2.
Telesar 2.


|
69. The Machine
Control Laboratory at KAIST at Teajon, Korea has another humanoid
project called the KAIST
Humanoid Robot (KHR-1). This project began in January of 2002 and
now includes Prof.
Jun-Ho Oh and 12 students. The KHR-1 stands 1.2 m tall and weighs
48 Kg. It has 21 DOF and can walk. There are videos on
their site.


|
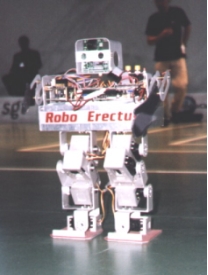
| 70. The ARICC (Advanced Robotics and Intelligent Control Centre) in the
School of Electrical and Electronic Engineering, Singapore Polytechnic has a major humanoid project going in which they are
building soccer playing humanoids. They have built several humanoids, the latest of which
is called Robo-Erectus III. It stands 50 cm tall and has 22 DOF. The project
includes about 15 members and is lead
by Prof. Changjiu Zhou.  
|
71. Imperial College London have two
humanoid projects. They have an upper half of a humanoid
similar to COG - called Ludwig.
They also have two small humanoids called Flip & Flop which stand
about 14" tall. They have movies of Ludwig. The primary
builders are: Murray Shanahan, Yiannis Demiris, Dave Randell, and Mark
Witkowski.


Ludwig
Flip & Flop |
| 72. Tohoku University also has a bipedal
walking robot project. This project is under the direction of Prof. Takashi
Emura at the Emura Laboratory. They have 4 professors and about 20 students. Their goal is to build a human-type autonomous robot.
They have been working on the project for at least a year. Below is an image of their bipedal
walker - called Monroe after Marilyn Monroe.
 17KB image
17KB image
|
73. The Politecnico di
Torino has a major humanoid project. It is called Isaac.
The leader is Prof. Guiseppe Menga and 7 students are also working on
the project. Isaac is about 61 cm ( 24 inches) tall and weighs
about 7 kg (15 pounds) It has 16 DOF and it is driven by a PC104.
Their humanoid won 2nd place in the Robocup 2003.
 Isaac & team.
Isaac & team. |
| 74. A
Chinese android was announced December 1, 2000. This android is 1.4 meters (55 inches)
tall and weighs 20kg (44 lbs). It was built at China Science and Technology University for
National Defense in Changsha, Hunan, China. Aparently they built another android back in
1990. They say "Pioneer" can walk and speak in several languages. See above
article for details.  Pioneer
(14KB) Pioneer
(14KB) |
75. Chalmers University in
Goteburg, Sweden has 3 projects now. They have the Elvis project which is now working
with their second prototype, and a new small walking android called Elvina.
Their staff is about 13. 

Elvis #2
Elvina |
| 76. Massachusetts Institute of Technology - the COG project
Cambridge, Mass, USA This project is developing a humanoid too.
Their humanoid has a head with four eyes (two for close up and two for distance), two arms
and a torso, but it has no legs yet. They have two
professors and about 7 students. They also claim about 10 alumni. The project
leaders are Rodney Brooks and Lynn Stein. Some of the best pix of COG are on Rodney Brooks home page. Below
are images of COG and a close-up of its head (with 4 eyes). 

|
76b. The MIT leg
lab has built a set of legs which is intended to be married to the COG torso soon. The
legs, called the M2 project, are featured in this month's Wired Magazine article about Androids.
(Sept. 2000, pgs 252 - 272).  111KB
111KB |
| 77. MIT has a new project called Coco. It
is supposed to be a small or perhaps a baby gorilla. It has 15 DOF and weighs about 20
pounds. Coco is about 12" (30 cm) square. 
|
78. Yokohama National University has a bipedal walking robot
project too. This project is under the direction of Prof. Atsuo Kawamura at the Kawamura
Laboratory. They have at least 5 staff
members. Their goal is to build a human-type autonomous robot. They have been
working on the project for at least a year. Below is an image of their bipedal walker.
 19KB image 19KB image |
| 79. Fukuda Lab at Nagoya University has a project called
the Biological Inspired Robot System (BIRS). Their robot appears
to be about 1.5 m tall and has 20 DOF. They have a staff of four
professors and about 30 students working on it.
|
80. The Korea
Maritime University of Pusan, Korea has a major bipedal android project under way. It
looks quite similar to some of the Japanese projects such as the Tohoku University project
(see #20 above). Here is the link - in Korean or English.

|
| 81. Here is the first Iranian android. It is called Firatelloid
(First Iranian Intelligent Humanoid). They have some movies on their multi-media page. The principal developers are Mohamad Shayganfar and
Benjamin Fonooni from the Azad University of Arak. (Arak, Iran).
 Firatelloid.
Firatelloid. |
82. Here is the "Headless
Horseman" of the Castrol Motorcycle company of Pangbourne, UK. The robot was actually built by Stahle Gmbh of Neuhaussen, Germany.

This robot has two arms and two legs and is mounted on the motorcycle.
|
| 83. The Humanoid Robotics
Laboratory in Linz, Austria has built a Barbot
- an anthropomorphic robot which buys beer at the bar and DRINKS it!
This is the first humanoid I have seen which eats or drinks
anything. They are taking suggestions on how to convert the beer
into power to run the robot. It is 1.7m tall and weighs and 30 Kg.
Barbot has 7 DOF and can be booked for your party or event.
 Barbot - Linz, Austria
Barbot - Linz, Austria
|
84. The Amorphic
Robot Works of Munich Germany has built a moving human skeleton
which they call Skelli.
It is the size of a normal adult and has 34 DOF including 16 in its
face. An advanced telemetry suit will allow a participant to teach the
machine behaviors. Designed to reflect commonality with humankind, some
of the expressions this humanoid machine will manifest are fear, anger,
joy, sorrow, surprise and impatience.
 Skelli with Chico MacMurtrie
Skelli with Chico MacMurtrie
 Shoulder detail of Skelli.
Shoulder detail of Skelli.
|
| 85. Waseda University
Humanoid project has another project called " Wendy ". "Wendy" is
similar to Halady. It has a total of 52 DOF. Beware that their text is in
white, so it won't print out correctly - at least on a color printer. Here is a
picture of Wendy.  Image is 42K.
Image is 42K.
|
86. Now Waseda University has another project called iSHA. This humanoid has 26 DOF
which are mostly driven by electric motors. It can operate autonomously for 2 hours. WOW!
Very impressive!
 iSHA.
iSHA.
|
| 87. Waseda has another project (which I finally found) called Robita. It is designed to conduct
conversions with people. They have several movies on Yosuke Matsusaka's page. This
project has been active since June 1999.
 Robita
Robita
|
88. Waseda University also has a project called
Wamoeba.
Its being built at the Sugano laboratory. It seems there have been 3 versions since 1995. The
picture below is the latest - called Wamoeba 2Ri.  Wamoeba - 2Ri
Wamoeba - 2Ri |
| 89. A Humanoid Robot System is being developed at the
Intelligent Robotics Research Center
of the Korea Institute of Science and Technology in Seoul, Korea. The goal is to build a
human-like autonomous robot. The
name of this project is CENTAUR
- after the half-human half-horse from Greek mythology - and it has 4 legs. Current staff
is 14. The picture below is the human upper body part. They also
have a vision eye coordination project here.
(* Fixed links 09/11/03 *) 

|
90. The Articifial
Intelligence and Media Lab of the Korea Institute of Science and Technology
now have two projects under developement. They have the AIM
project and the AIMET project. They are being developed
on the Taejon Campus in Taejon, Korea. They have some video clips to
look at too.


AIM
AIMET (left), AIM (center)
|
| 91. The University
of Florida has a humanoid project at their Machine
Intelligence Laboratory, Gainsville, Florida. Their humanoid
is called Pneuman.
Professors included are: Antonio Arroyo, Michael Nechyba, Eric
Schwartz. There are also many
students working on the project. The humanoid is 59 inches tall,
weighs 102 lbs and has 25 DOF. Here is another
article I found.
 Pneuman.
Pneuman. |
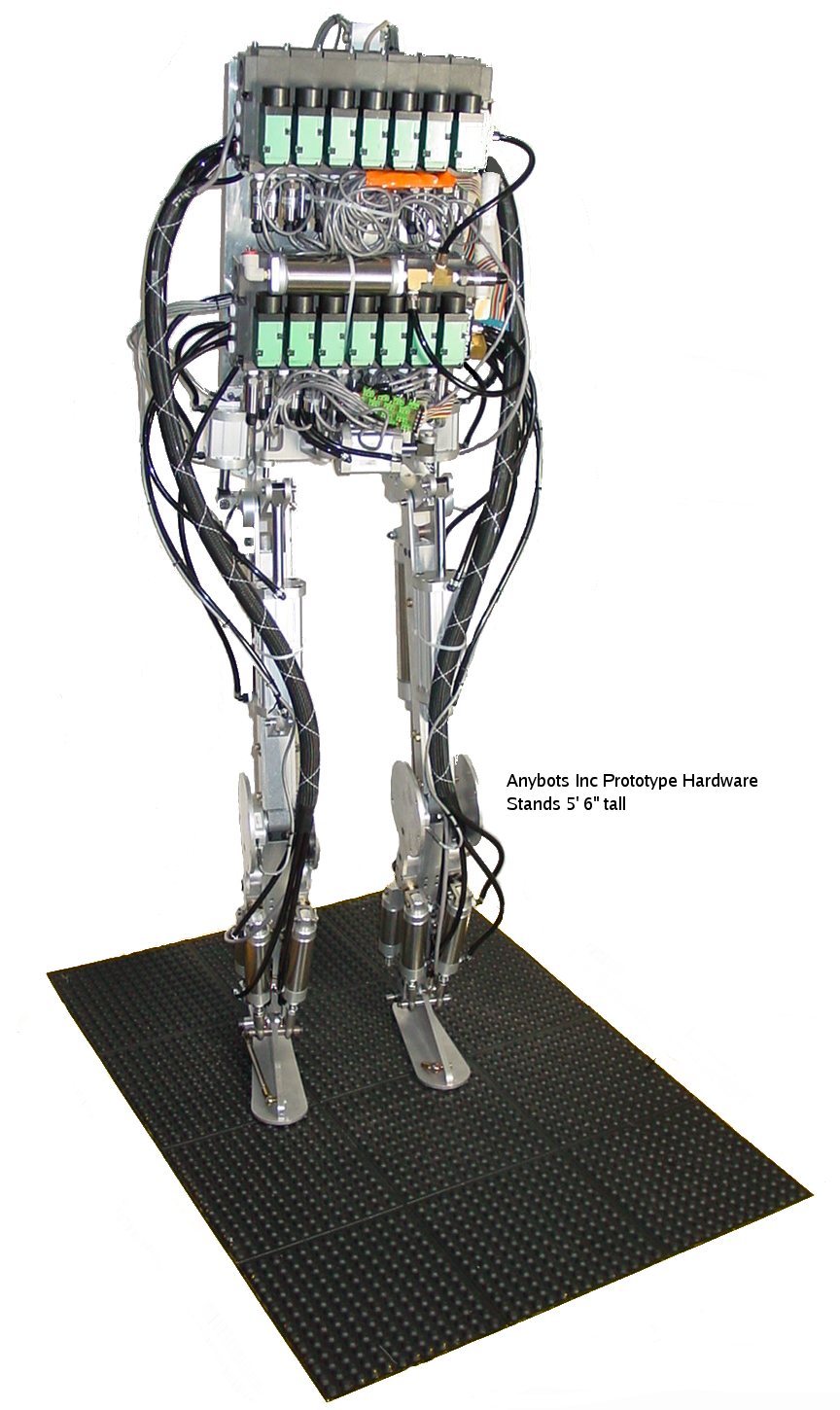
92. Anybots of
Mountain View, California has a full scale humanoid
project under way. It appears that each leg has 7 DOF.
They have a video of their legs balancing vertically. They also
have prototypes of hands.

|
| 93. The University of Karlsruhe in Germany has a
big project called SFB 588,
a humanoid robot. Their robot doesn't have legs yet but it appears to have very
capable hands with about 15 DOF for each hand. Thus the overall number would be
between 40 & 50 DOF. 
 Nice hands. Nice hands. |
94. The Institute of Measurement Science at the Bundeswehr University of
Munich (Germany) has a big project called Hermes.
My appologies to them for not listing them long ago. This project has been going since
1996. The principal investigator is Rainer Bischoff and there are 7 other staff members
and about 35 past staff and students who have worked on the project. They have made good
progress.  
|
| 95. Carnegie Mellon University (CMU) and the University of Pittsburg
started a major project called the Nursebot,
with a $1.4 million grant from the National Science Foundation. This appears to be
huge because they have as many
as 50 people working on various parts of it. They seem to have two prototypes: Pearl
and Florence. Its about 4 feet tall.
 50 KB 50 KB
|
96. Tamim Asfour, a grad student at the University of Karlsruhe (Germany),
is part of a major project which is building a humanoid called ARMAR. Number of staff:
unknown to me. 
ARMAR - 124K
|
| 97. The University of Massachusetts at Amherst has a humanoid project at
the Laboratory for
Perceptual Robotics. Prof. Roderic Grupen is the director.
They have four
professors on the project and about 20 students. They have
built the upper half of a humanoid - similar to MIT & Vanderbilt.
Their humanoid has about 29 DOF, including 2 functional arms (7 DOF
each) and two 3 fingered hands (4 DOF each).
 UMass humanoid.
UMass humanoid.
|
98. Vanderbilt University School of Engineering has a humanoid robot
called ISAC
under development. This project has four professors and 23 students. The project
has been under way for about 5 years.Their current goal is to enable ISAC to learn from
his own experiences and to interact with people in a natural way. Ultimately, ISAC will be
an in-home care- giver for the elderly or infirm. The Director of the Center for
Intelligent Systems is Prof. Kawamura. Their staff includes
Profs. Peters, Wilkes, Biswas, and Gaines.
 46KB image 46KB image
|
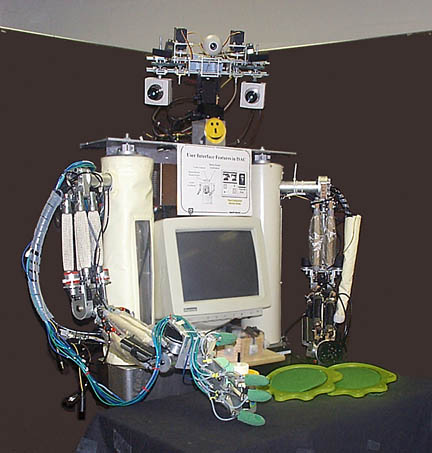
| 99. The ProtoAndroid
project (Austin, Texas) This project is financed by the Faustex Systems Corporation,
whose founder and president is David Santos. This project has been under development since
at least 1992. It is 6' 4" tall and weighs about 300 pounds. Size
of staff is about 5. They have also built the H2 martial arts robot
shown below.
 116K. 116K.
|
100. Thailand now has its first android project. King
Mongkut's University of Technology at Thonburi is building an android too. 
|
| 101. Started in 1996, Aandroyds
Inc offers a line of 2, 4, and 6 legged machines for sale. The machines are
designed for home, office, and industry, with custom lab and space models available. Find
them at Aandroyds.com. |
102. Dr. Jennifer Best at UCLA is leading a new android development
project . Their main web link
may not work because their server is down. You might try this one. With a major school
like UCLA backing this project, I'm sure we can expect great things. |
| 103. Kumoh
National University of Technology in Seoul, Korea has a project which is building a
miniature humanoid robot. It is being built by the mechatronics group which is part of the
mechanical engineering department. They claim that their humanoid robot can walk up and
down stairs. WOW! Here are a couple of papers I found. [1] Y. W. Sung, and S. Y. Yi,
"A miniature humanoid robot that can walk up and down stairs", Proc. of
International Symposium on Robotics'2001, Seoul, Korea, 2001
[2] Y. W. Sung, and S. Y. Yi, "The Development of a Miniature Humanoid Robot
System", Proc. of International Symposium on Robotics and Automation 2000, Monterrey,
Mexico, pp.133~138, 2000
|
104. Tsinghua University
in Beijing, China has a bipedal humanoid robot project called THBIP-I. This project
is several years old. Here is one news article.
Here are a few papers I found: [1] “The Biped Humanoid Robot THBIP-I”
Li Liu, Jinsong Wang, Ken Chen, Jiandong Zhao and Dongchao Yang (Tsinghua University,
China)
[2] “Gait Planning of Humanoid Robot Based on Anticipant ZMP Tranck” Dongchao
Yang, Li Liu, Jinsong Wang, Ken Chen (Tsinghua University, China)
[3] "A New Method of Gait Generation for A Biped Walking Robot" Kai Xu, Ken
Chen, Jinsong Wang, Li Liu, Dongchao Yang, Jiandong Zhao
Institute of Manufacturing Engineering, Tsinghua University, China |
| 105. Intelligent
Earth, a company located in Kirkcaldy, Scotland, has announced a new
project to build a full sized walking and talking android. The
announcement appeared at
the end of this news article from the BBC.
 Doki Doki
|
106. The University of
Freiburg in Freiburg, Germany started
a Learning Humanoid Robots project in January of 2004. The
project, called Nimbro, is being directed by Sven Behnke and will
involve about 12 people. They will be building a humanoid which
will be about 150 cm tall (5 feet) and will weigh about 38 Kg. It
will have 22 DOF. They would like to compete in the Robocup
Humanoid Soccer tournament.
|