|
1.
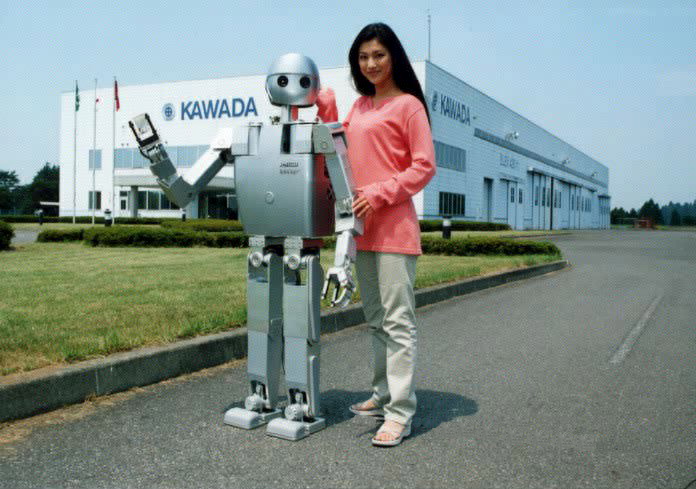
El instituto nacional de la ciencia y de la tecnología industriales
avanzadas (AIST) de Japón conjuntamente con las industrias de Kawada
ahora ha lanzado
el
humanoid de HRP-4C. Este humanoid coloca 1.58 metros de alto (62") y
pesa 43 kilogramo = 95 libras. Puede caminar lentamente y los parecer
una señora joven. Ella tiene 30 DOF y venderá para cerca de 20 millones
de Yenes o $200.000.
Algunos vídeos están aquí.

 |
2. Kokoro y la universidad de Osaka han desarrollado un nuevo Actroid llamado
androide realista DER3 (sucesor a DER2). Estos androides miran mismo el ser
humano y la charla y mueven sus cabezas, brazos, manos, y cuerpos.
DER2 (acoplamiento del artículo) (acoplamiento del sitio) (acoplamiento
del youtube)
DER3
(acoplamiento del artículo) (acoplamiento del sitio) (acoplamiento del youtube)


|
|
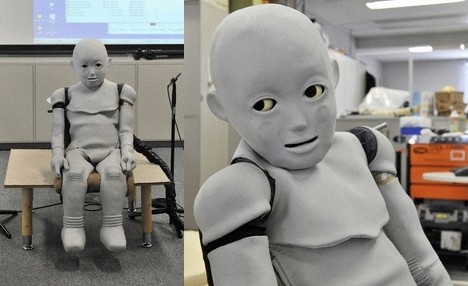
3. El proyecto de JST ERATO Asada y la
universidad de Osaka han
construido un CB2 llamado androide niño-clasificado (robusteza del niño con el
cuerpo biométrico). Es 130 cm. alto, pesa 33 kilogramos., y tiene 56 DOF. Tiene
las cámaras para los ojos y micrófonos para los oídos. También tiene 197
sensores táctiles encajados en la piel del silicón.
Página androide.
Acoplamiento 1;
Acoplamiento 2;
Acoplamiento 3;
vídeo 1;
vídeo 2;
vídeo 3;


|
4. El consorcio de Cub de la robusteza (11
organizaciones europeas) ha construido a una Robot llamada humanoid
clasificada niño muy sofisticado Cub. Este humanoid tiene 53 DOF, coloca 104 cm
altos, y pesa 22 kilogramos. Más de 40 personas en 11 instituciones a través de
Europa han desarrollado este humanoid. Hay dos vídeos
aquí y
aquí.


|
|
5. KITECH (instituto coreano de la tecnología industrial) ha introducido otro
androide llamado EveR-3. Ella es 1.57 m de alto (5' 2") y pesa 135 libras (60
kilogramos) y es capaz de 16 expresiones faciales. Ella tiene 35 DOF en su
cuerpo superior.
(acoplamiento del artículo) (acoplamiento del artículo) (acoplamiento del
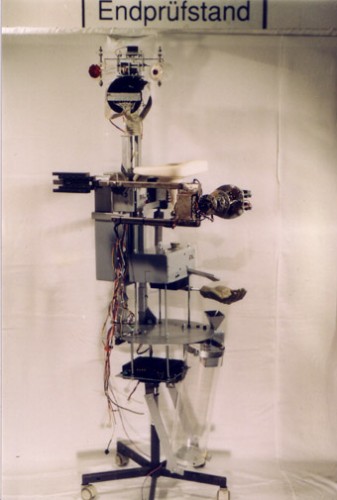
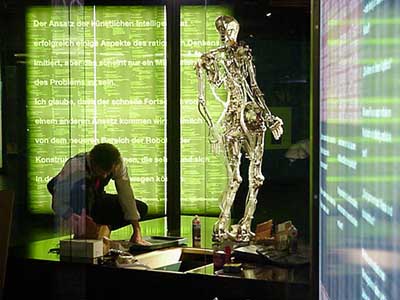
youtube) (acoplamiento del youtube)


EveR-3 |
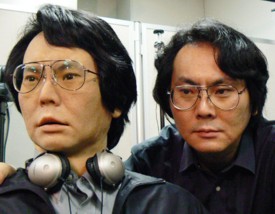
6a. Profesor Hiroshi Ishiguro de la universidad de Osaka ha tenido una
robusteza del doppelganger hecha de se. Ishiguro es el mismo profesor que
conduce el equipo que construyó el actroid (véase abajo) y el actroid DER y el
actroid DER2 (demostrado arriba). Este androide tiene 46 grados de libertad. Hay
varios videos disponibles aquí. Otra
noticia está aquí.

6b. Doppelgangers está consiguiendo popular. Aquí
está uno de Zou Renti (l) que fue demostrado en la expo 2006 de la
robusteza de China llevada a cabo recientemente en Beijing.

|
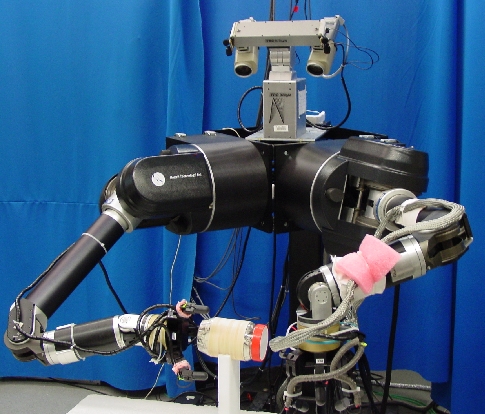
| 7. Osaka University & Kokoro Inc. ha producido una
versión aumentada del humanoid de Actroid llamado
Repliee Q1 para el mundo 2005 de la expo justo que ahora está entrando
encendido en Nagoya, Japón. Repliee
Q1 tiene la piel y miradas del silicio muy humanas mientras que ella
se sienta y los gentures a usted. Esta robusteza tiene 41 DOF
(contra 31 para Actroid).
 < = Repliee Q1
< = Repliee Q1
|
8. Otro grupo coreano en KITECH ha producido un
androide que es mucho como Repliee-Q1. Se llama EveR-1. Es el cerca de 1.6m alto
y pesa cerca de 50 kilogramos. El equipo,
dirigido por Baeg Moon-hong-hong, un investigador mayor en el instituto de Corea de la tecnología
industrial, jueves (5/4/06) tomaron los abrigos
del androide femenino, nombrado EveR-1, durante una exposición en el
centro de la cultura de la educación de Seul. Baeg, que pasó
apenas 3 mil millones ganó (los 3.16M USD) en crear EveR-1 en un
año, está mirando para exceder a sus rivales japoneses haciendo el
movimiento modelo cuatro miembros por tarde este año.


EveR-1 KITECH
|
| 9. Nuevo humanoid de Asimo Honda ha introducido su humanoid actualizado de Asimo.
Es 130 centímetros de alto, pesa 54 kilogramo = 119 libras, y tiene
34 DOF. Aquí
está un vídeo agradable.

|
10. Aquí está
Aiko que un
humanoid muy antropomorfo construyó por Le Trung (Brampton,
ENCENDIDO, Canadá). Ella tiene actualmente 23 DOF cuyo 10 están en
sus dedos. En futuro ella tendrá 12 más DOF. Ella es 1.52 m de alto,
pero no puede levantarse sola todavía. Trung tiene algunos
vídeos aquí. ¡Gran
trabajo en solamente un año!


Aiko
with Trung |
| 11. Los sueños de Kokoro y la
universidad de Osaka anunciaron una sentada de nov androide el 19 de
2003 en la exposición internacional 2003 de la
robusteza en Tokio. Este androide se llama Actroid
y es MUY realista. Especificación de Actroid:
El sistema consiste en tres unidades separadas: Pieza de Humanoid: Altura el = 1.3m;
anchura los = 0.42m; longitud que se sienta los = 0.725m; peso = 30 kilogramos. El androide tiene 31
DOF. Funciona el aire encendido comprimido y la electricidad (120w). Unidad de control:
Altura los = 0.6m; anchura los = 0.75m; longitud
los = 0.6m; peso = 40 kilogramos; contiene la computadora principal. Unidad del compresor:
Altura el = 1.37m; anchura los = 0.9m; longitud los = 0.9m; consumo de energía = 3.7 kilovatios;
ruido < DB 50.
|
Aquí está una película de
Actroid. Aquí está otro artículo acerca de Actroid.


Actroid
con los amigos. |
| 12. China ha introducido a Dion llamado androide cantante. Mientras que no es
casi tan avanzada como el Actroid demostrado arriba, es muy realista. Es un
androide derecho vida-clasificado con muy womanly una forma. La
historia y el vídeo están aquí.

|
13. El instituto de la automatización de la academia china de ciencia en Beijing
introdujo un nuevo humanoid femenino llamado Rong Cheng de agosto el 7 de 2006.
Este humanoid es 168 centímetros de alto y pesa 60 kilogramos. El diseñador
primario era Yue Hongqiang y su equipo tomó un año para construir este
humanoid en un coste de $37.500 (300.000 Yuan). Rong Cheng será enviado al
museo de la ciencia de Sichuan en Chengdu donde ella estará recepcionista y un
guía turístico para el museo.
Del Artículo
Del Artículo
Video (Quicktime)


|
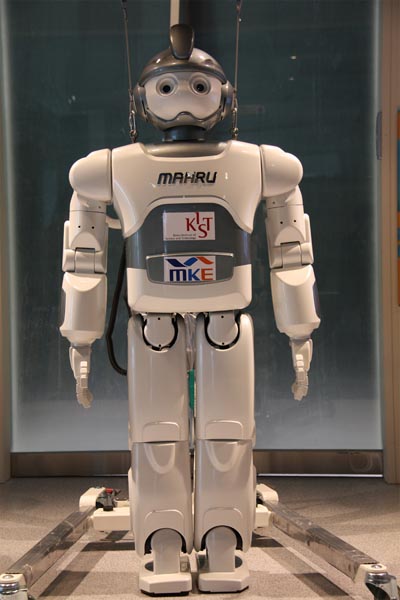
| 14. KIST acaba de presentar a la criada de la robusteza de Mahru-Z
(2010). Es 130 cm. alto, pesa 55 kilogramos, y tiene 3 dedos en cada mano. Tiene
35 DOF. Acoplamiento 1;
Acoplamiento 2;
Acoplamiento 3;
vídeo 1;
vídeo 2;

 Z (right)
Z (right)
|
15. KIST introdujo el Mahru-R en 2009. Es 145 cm. alto, pesa 67
kilogramos., y 35 DOF y tiene 3 dedos en cada mano y camina en 2.6 kilómetros.
/hr.
Acoplamiento 1;
vídeo 1;
vídeo 2;

|
|
16. KIST introdujo el Mahru-M en 2008. Es cerca de 150 cm. alto,
pesa 62 kilogramos., y rueda alrededor en las ruedas. Probablemente cerca de 20
DOF.
Acoplamiento 1;
M (left)

|
17. Choromet (HRP-2m) es un humanoid de lujo del juguete. Es 35
cm. alto, pesa 1.5 kilogramos., y tiene 20 DOF. Su coste es cerca de 500.000
Yenes ($4.400). Choromet puede acostarse y de pie por sí mismo. Puede también
colocarse en una pierna. Utiliza un sistema operativo del linux. Choromet fue
desarrollado por el instituto avanzado Japón de la ciencia industrial y de la
tecnología (AIST) y 4 empresas privadas.
Acoplamiento 1;
vídeo 1;

|
|
18. E-nuvo es 126 cm. humanoid alto construido por el
Instituto
de Tecnología de Nipón. Pesa 15 kilogramos., y tiene un total de 21 DOF. Utiliza
energía de batería del ion de litio.
Acoplamiento 1;
vídeo 1;

|
19. ATOM-7xp es un nuevo humanoid (el enero de 2010) desarrollado
por Dan Matías en FutureBots durante los 8 años pasados. Es 158 cm. alto, pesa
73 kilogramos., y tiene 49 DOF (10 incluyendo para la cabeza y 10 para las manos).

|
| 20. La tecnología del amigacho de los UAE (emiratos árabes unidos) ha
anunciado un nuevo humanoid muy sofisticado llamado REEM-A. Está parado 1.45 m
de alto, pesa 41 kilogramos y tiene 30 DOF (grados de libertad). Su
especificación está aquí. Hay algunos videos agradables
aquí.

|
21. Kawada ahora ha lanzado el humanoid de HRP-3P. Esta robusteza está parado
160 centímetros de alto y pesa 65 kilogramos. Tiene un total de 36 grados de
libertad. La página
de HRP-3P de Kawada es aquí (en japonés por supuesto) aquí
es un artículo de Engadget. Aquí está la
especificación completa de HRP-3P con las porciones de cuadros agradables. Aquí
está el lanzamiento de prensa de AIST.


|
| 22. Tmsuk de Japón ha producido una
robusteza nueva que llaman Kiyomori. Tienen su propio Web
site con videos aquí. Kiyomori se presenta como guerrero de Samurai. Este
vídeo de Youtube lo demuestra que camina.

|
23. JVC ha lanzado una robusteza pequeña nueva del humanoid llamada J4. Está
parado 20 centímetros de alto y pesa solamente 0.77 kilogramo pero tiene 26
grados de libertad. Aquí está una
presentación agradable de Plyojump.


|
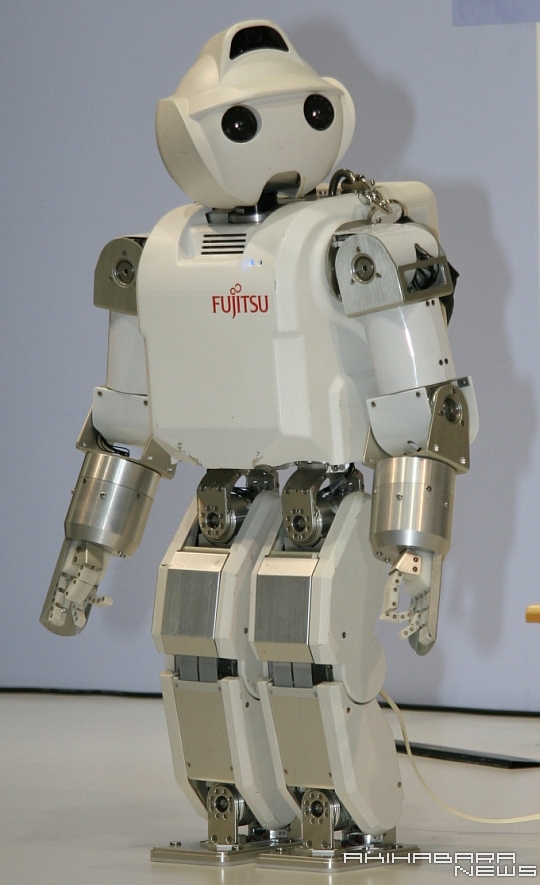
| 24. Fujitsu ahora ha lanzado el HOAP-3.
Este humanoid pequeño está parado 60 centímetros de alto y pesa 9 kilogramos.
Aquí
está un artículo. Este humanoid tiene 28 grados de libertad y utiliza un
procesador del Pentium de 1.1 gigahertz que funciona el RT-Linux-Linux.


|
25. Un grupo británico ha producido una robusteza de ejecución llamada
Robothespian. Este proyecto
comenzó en enero de 2005. Robothespian tiene cerca de 30 DOF, coloca 175 cm
altos (más el soporte de 18 cm) y pesa 33 kilogramos. Este agente de la
robusteza está disponible ahora para 55.000 libras (US$ 85.000, o los Yenes de
los 7.9M). Hay dos vídeos
aquí y aquí.


|
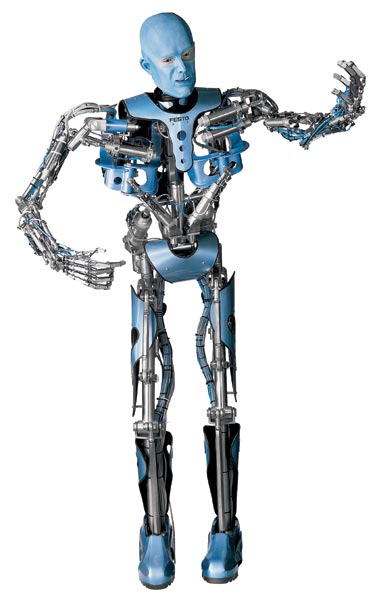
| 26. Fesco, los expertos de la neumática, ha construido un Tron llamado androide enorme X. Este androide está parado cerca de 2.8 m
(9 pies) de alto y pesa cerca de 300 kilogramos (660 libras). Se funciona cerca sobre 200 cilindros neumáticos de todos los diversos
tamaños. Aparently este androide fue
construido en Australia en 1997. ¿Quizás el modelo
actual es una segunda versión??


Tron-X - 200+ Dof
|
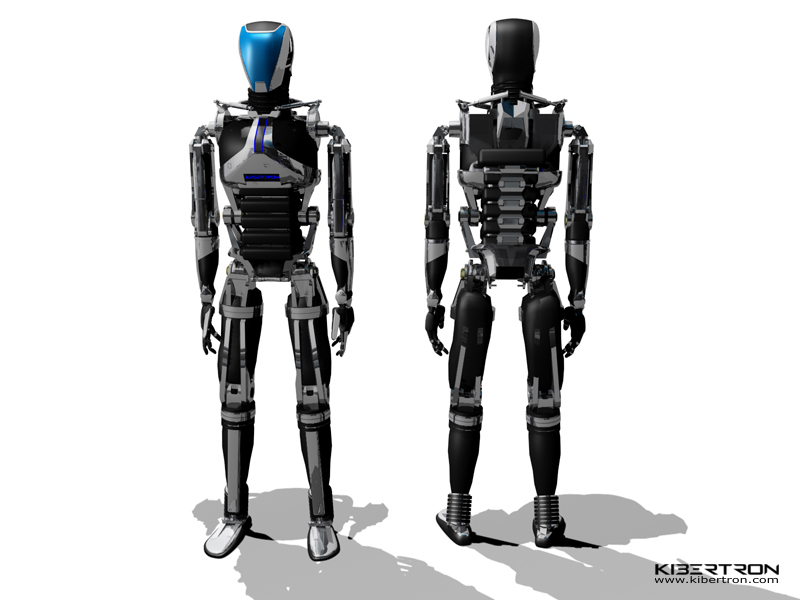
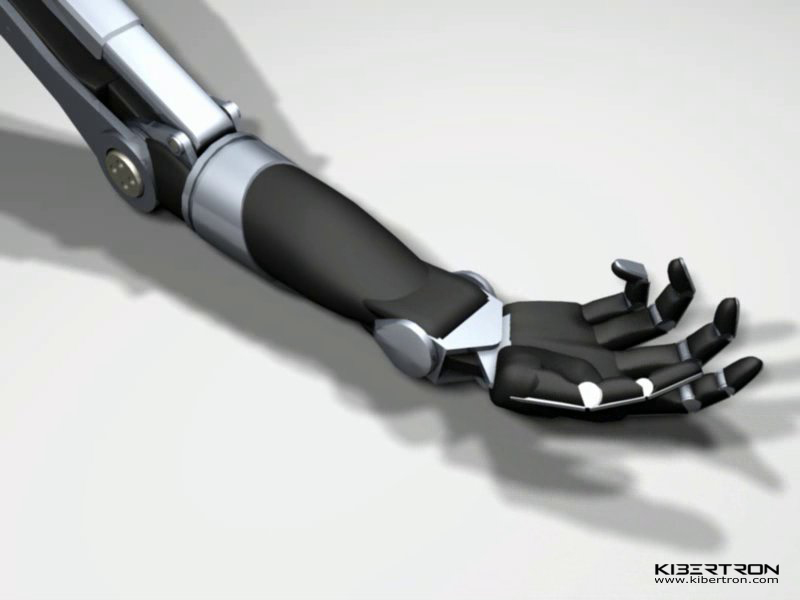
27. Una compañía llamó a Kibertron Inc, situado en Sofía,
Bulgaria tiene un proyecto a gama completa del humanoid llamado Kibertron. Su humanoid
parece un adaptador. Es el 1.75m alto (5 ' 9") y pesa 90 kilogramos (200 libras). Tienen un personal de
23. Kibertron tiene 82 DOF que mucho. Las manos tienen 20 DOF cada uno y los brazos tienen 8
más DOF para un total de 28 para cada brazo y mano.
Aquí está su contorno del proyecto.


brazo y mano delanteros y traseros
|
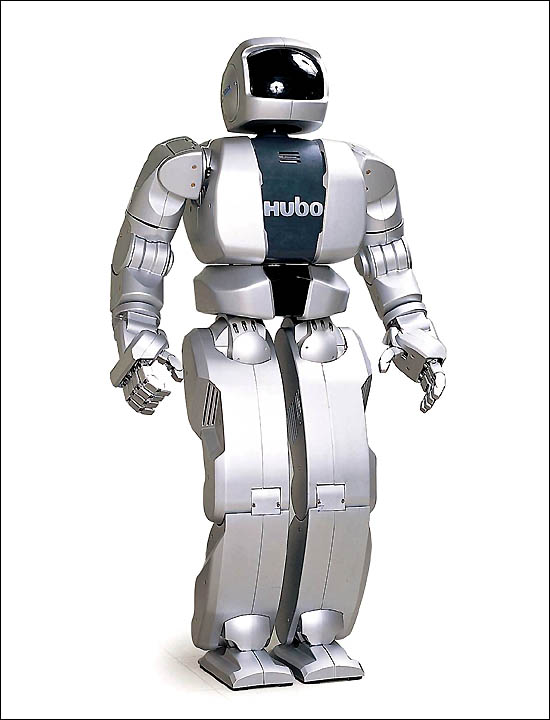
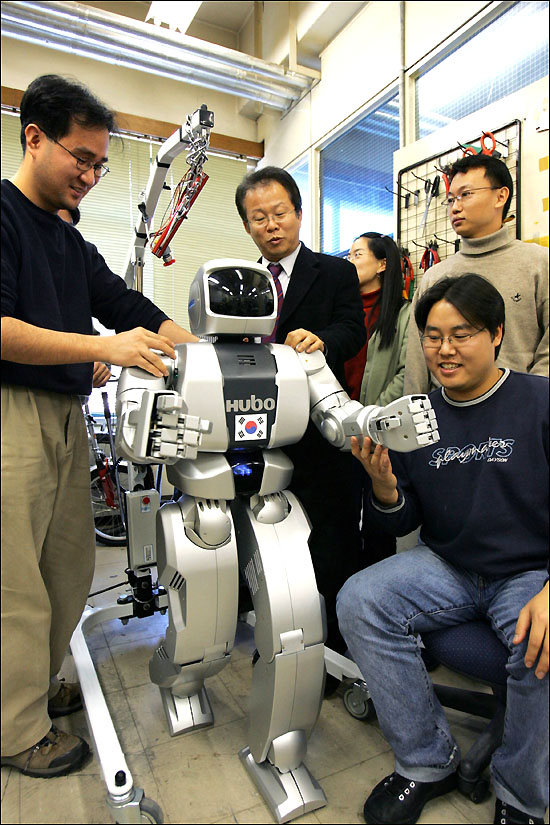
| 28. KAIST anunciado de enero el 6 de 2005, un nuevo humanoid que
llaman HUBO. El líder de proyecto es profesor Junio-ho Oh, que
también se ha nombrado "KAISTian" del año. Su humanoid
tiene 41 DOF, está parado el 1.25m alto (49") y pesa cerca de 55
kilogramos (121 libras). Su androide puede caminar,
hablar, y entender discurso. Esta robusteza camina en un
índice de 1.25 km/hr. Corea es claramente catching para arriba
en la raza del desarrollo del humanoid del mundo. Este
grupo está situado en Daejeon, Corea.


El caminar
de Hubo
Hubo puede moverse los dedos independientemente (mientras que no puede ASIMO). Aquí está un par más
artículos: Noticias y Theautochannel
de Chosun.
|
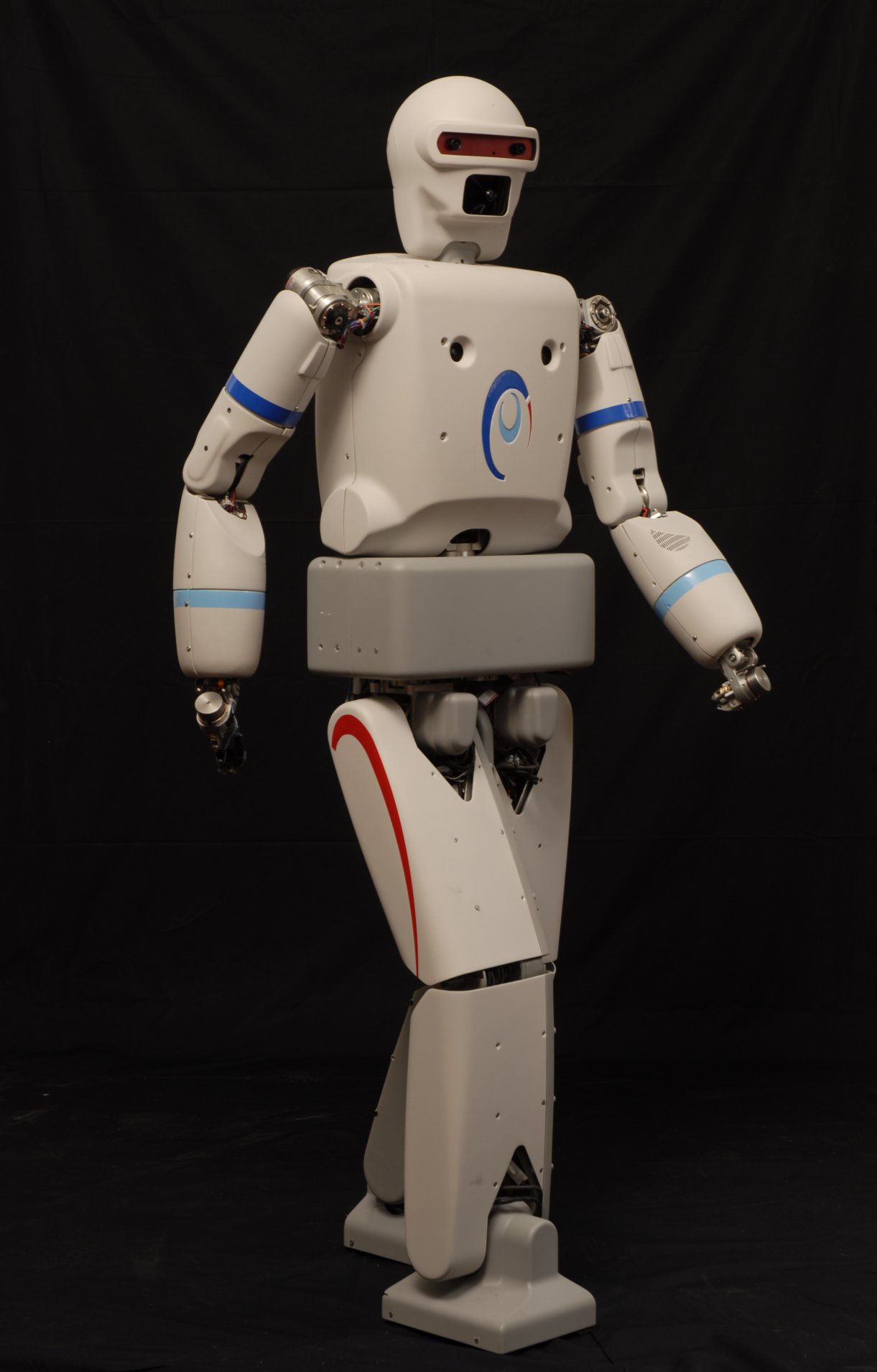
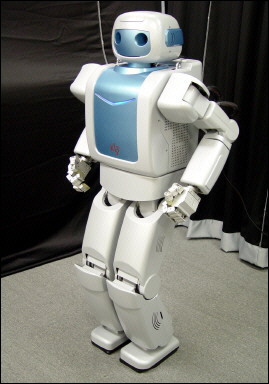
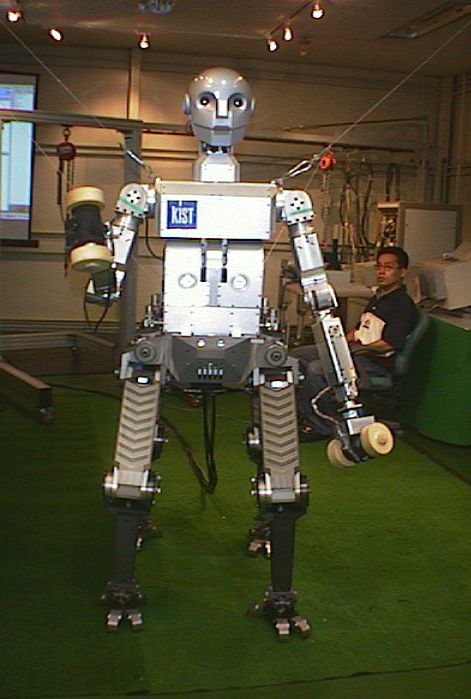
29. KIST ha construido dos humanoids
llamados Mahru
(varón) y Ahru (hembra).. El equipo del desarrollo es plomo de vago-jae
You. Este grupo demanda su humanoid es el humanoid primero red-basado del mundo.
Piensa como un ser humano y aprende como un ser humano. Está parado el cerca de
1.5m alto (60") y pesa cerca de 67 kilogramos (147 libras). Puede caminar,
hablar, y entender discurso. Camina en 0.9 km/hr. Tiene 35 grados de libertad.
El equipo ahora está trabajando en Mahru II que sea lanzado en 2009.


Mahru
Mahru II
|
| 30. De septiembre el 10 de
2001 los laboratorios inc. de Fujitsu anunciaron su juguete HOAP-1
llamado androide, un androide el 18"alto de 13
libras con 20 grados de libertad. El coste es $41.000 o 4.8
millones de Yenes. Ahora han anunciado otro androide llamado el HOAP-2. Su
tamaño casi igual.


HOAP-1 HOAP-2
|
31. De sept. el 19 de 2003 Sony anunció
otro humanoid pequeño llamado QRIO. Su absolutamente similar al SDR-4X. Puede caminar mejor y puede recuperarse a partir de
caídas mejor.
 QRIO QRIO
|
| 32. Sony introdujo el SDR-4X para Robodex 2002 . Gran androide nuevo a
competir contra el HOAP-1. Películas. Muchos cuadros. Artículo y más cuadros. 
|
33. Kawada Industries Inc. ha
introducido el HRP-2P para
Robodex 2002. Este humanoid aparece ser muy impresionante. Es 154 centímetros (60") de alto, pesa 58kg (127
libras) y tiene 30 DOF. Aquí está un
lanzamiento de las noticias (en japonés).
Note la CARENCIA de un paquete de la batería. Aquí está una nueva historia
sobre HRP2. Hay un nuevo acoplamiento a algunos videos de HRP-2 en la
acción.
 
|
| 34. Una robusteza dental del entrenamiento llamada Simroid ha sido
introducida por el Dr. Naotake Shibui, de la universidad dental de Nippon en
Tokio, que colaboró con los técnicos en Kokoro Co. para desarrollar la robusteza.
Mira chillidos muy humanos y uniformes en dolor cuando el aprendiz incurre en
una equivocación.
 Simroid
Simroid
|
35. Toyota Motor Company ahora ha introducido un humanoid que puede tocar el
violín. Esto demuestra una mejora en la destreza de los dedos. Esta robusteza
está parado 1.52 m de alto y tiene 17 empalmes en sus brazos y manos.
El vídeo
de la robusteza que juega "pompa y circunstancia # 5" por Elgar está aquí.

|
| 36. Toyota Motor Company anunció su HABITACIÓN aguardada larga de androides de marcha la 11 de 2004 en Tokio. Planean 4 modelos (demostrados en éstas y las 3
entradas siguientes) que les llaman las robustezas del
socio y que se diseñan para funcionar como las ayudantes personales
para los seres humanos. Primer es la versión que camina. Este
androide es el 1.2m (4') alto y pesa 35 kilogramos (77 libras). Se piensa para asistir a los ancianos.

Página japonesa
|
37. Planes de Toyota para demostrar sus
androides para la primera vez en la exposición
2005 de la EXPO de la armonía
global cuál ocurrirá el año próximo (del de marcha 25 de 2005 al
de septiembre 25 de 2005 en Aichi, Japón. El segundo
modelo es la versión del balanceo. Este humanoid rueda alrededor en las ruedas pero
tiene un cuerpo superior humano-que mira. Se piensa para
los propósitos de la fabricación. Es el 1m (40") alto
y también pesa 35 kilogramos (77 libras).

Página japonesa
|
| 38. El tercer modelo de Toyota es fácilmente la robusteza más inusual del
grupo. Este modelo se llama la versión aumentable. ¡Es básicamente una silla que
puede CAMINAR! ¡ULULACIÓN! ¡Un qué concepto! Está parado 1.8 m (6')
de alto y pesa 75 kilogramos (165 libras). Note que la persona
en la silla está usando un casco protector. Uno espera
que el casco no sea necesario.

Página japonesa
|
39. El cuarto modelo que es producido por
Toyota es una versión
alambre-funcionada. No se dio
ningunos datos sobre su tamaño o peso. Es más ligero
que los otros y puede moverse más rápidamente. Toyota tiene películas de sus robustezas en la acción
en su sitio.

Página japonesa
|
| 40. Dos nuevos humanoids
llamados ARNE y ARNEA fueron anunciados de agosto el 5 de 2003 en
Rusia. Fueron construidos por un St. Petersburg New
llamado compañía Era y estudiantes de la universidad de la escuela
politécnica del St. Petersburg. Estos humanoids están parado
1.23 m (4') de alto y pesan 61 kilogramos (134 libras). Tienen
28 DOF. El proyecto, plomo de Alexander Yakovlev del
sector técnico de la robusteza de nueva era, ha estado funcionando
por dos años.

|
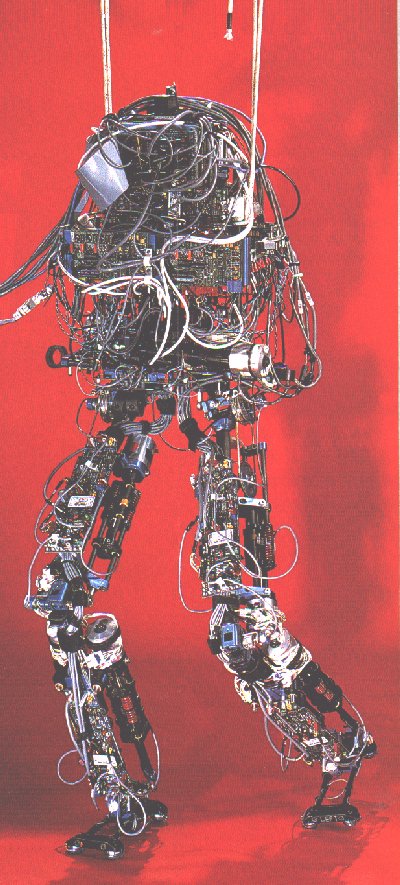
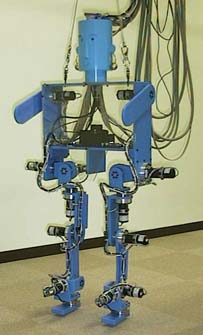
41. Kawasaki Heavy Industries, construcción Co.,
Ltd., instituto nacional de la ciencia y de la tecnología industriales avanzadas
( "AIST"), y Honda de Tokyu tiene un nuevo
proyecto llamado HRP-1S. El
humanoid fue construido por Honda y el software de control fue
desarrollado por el AIST. Este artículo
demuestra el humanoid que funciona un backhoe.
Asumimos que el humanoid tiene el mismo número del DOF que
Asimo o P3 de Honda.

|
| 42. El instituto de Beijing de la tecnología
ahora tiene otro proyecto del humanoid que se llame BHR-2. Este humanoid se
llama "Huitong",
el niño. Es 160 centímetros de alto y pesa cerca de 63 kilogramos. Se ha
lanzado poco la otra información, pero asumimos en tenemos por lo menos 32 DOF
y fuimos convertidos probablemente por el mismo grupo que desarrolló BHR-1.
 BHR-2
BHR-2
|
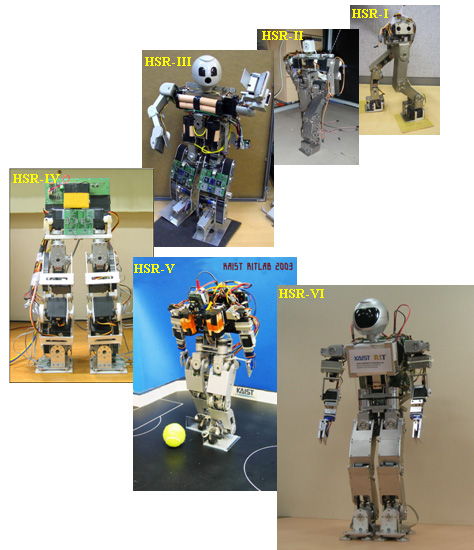
43. KAIST tiene otro esfuerzo importante del desarrollo del humanoid en el
laboratorio en Daejeon, Corea de RIT (tecnología
de la inteligencia de la robusteza). El líder de proyecto es profesor
Jong-Hwan Kim. Tienen cerca de 15 personas el trabajar en el proyecto y han
construido una serie de 6 o 7 robustezas del humanoid el más último de cuál
es el HSR-VI HanSaRam
también llamado. Tiene 25 DOF el consistir en de 12 motores de la C.C. y de 13
servo motores.  HSR
HSR
|
| 44. El instituto de Beijing de la
tecnología tiene un proyecto grande del humanoid llamado BHR-1. Este androide es 1.58 m (5 ' 2") de alto y pesa 76
kilogramos (167 libras). Tiene 32 DOF. Puede caminar en 1
km/hr con pasos de 33 centímetros. El líder de proyecto es
profesor Li Kejie.Other que el personal incluye Qiang Huang, Yuechao
Wang, minuto tan, Tianmiao Wang y Jinsong Wang. Este
androide aparece ser muy avanzado y también similar a varios de los
androides japoneses demostrados arriba.
 BHR-1 BHR-1
|
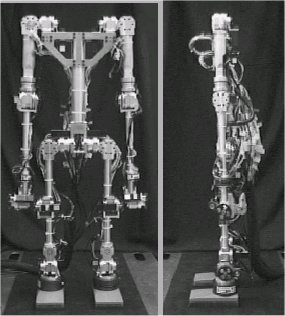
45. El avión y la
división mecánica de los sistemas de las industrias inc. de Kawada. construyó el androide H7 para Univ de Tokio. Ahora han comenzado un proyecto de su propio a usar
algo de la misma tecnología de H6 y de H7. Su Isamu llamado. 

Isamu es 1.5 m (5') de alto y el 6 m
de par en par y pesa cerca de 55 kilogramos (121 libras). Tiene 32 DOF y usted puede ver que la cabeza es más
antropomorfa que H6 o H7.
|
|
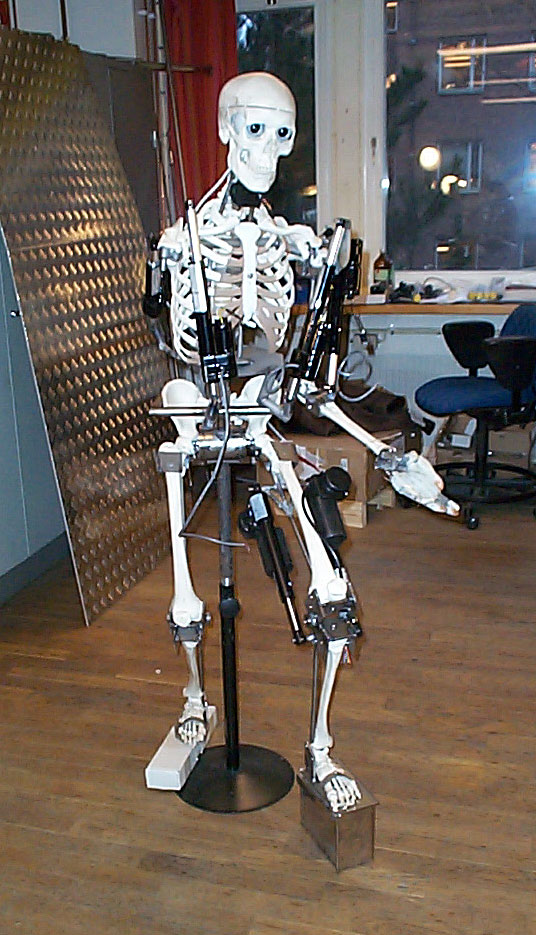
46. La robusteza de ECCE (cognición incorporada en una robusteza
obedientemente dirigida) es un humanoid inusual en que los músculos y el
esqueleto están modelados después de nuestro esqueleto y músculos humanos. Fue
construida por un consorcio de universidades incluyendo Universidad de Essex,
universidad de Sussex, universidad de Zurich, universidad de Belgrado, universidad de Munich, y el estudio de la robusteza
. Es un efecto del proyecto de Cronos. Tiene 80 DOF. Fue
introducido el 11 de agosto de 2009.
vídeo 1;
vídeo 2;

|
47. Las industrias de Kawada introdujeron el robot de montaje de
NEXTAGE el 19 de noviembre de 2009. Se diseña y parece muy bien grande. Tiene 15
DOF y puede levantar las cargas útiles de 1.5 kilogramos.
vídeo 1;
vídeo 2;


|
|
48. La universidad de Tehran (Irán) ha introducido una robusteza agradable
llamada Surena-2. Esta robusteza parece las robustezas numerosas en esta lista.
Es 1.45 m de alto y pesa 45 kilogramos. Tiene 22 DOF (12 en sus piernas, 8 en
sus manos, y 2 en su cabeza). Esta robusteza sigue un Surena-1 muy primitivo que
tenía solamente 8 DOF. Surena-2 asumió el control 10.000 horas-hombre de
esfuerzo para terminar.
(acoplamiento del artículo) (acoplamiento del artículo) (acoplamiento
del artículo) (acoplamiento del artículo)
 Surena II
Surena II
|
|
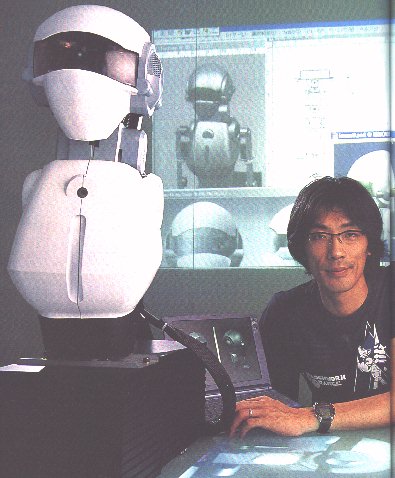
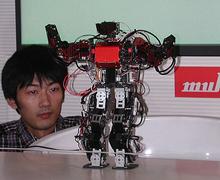
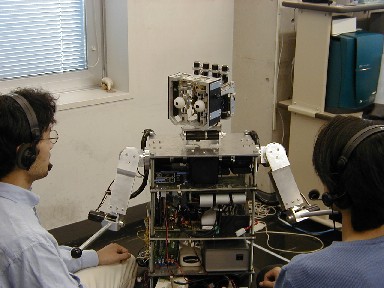
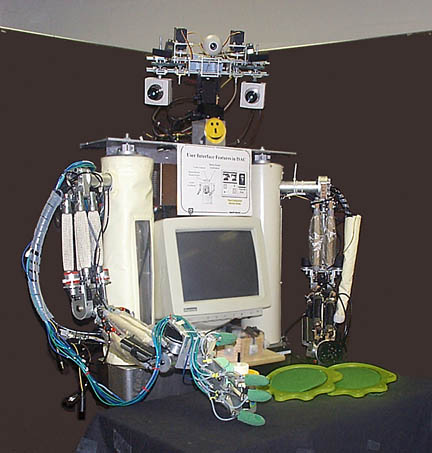
| 49. Hiroaki Kitano de los sistemas simbióticos de Kitano (Tokio, Japón) que es un subsidiario de Japón Science y de
Technology Corp (véase la entrada a la izquierda - # 11) que
alternadamente es financiada por el gobierno japonés está
construyendo un androide que él llame los SIG (grupo simbiótico de
la inteligencia). La foto debajo de los SIG y de Tatsuya Matsui
de las demostraciones. Kitano ha desafiado el mundo de
constructores androides. Él cree que su androide será
el arquetipo. Veremos sobre ése. A propósito, están buscando a gente para
ensamblar su proyecto.  
Matsui-matsui-san y SIG
|
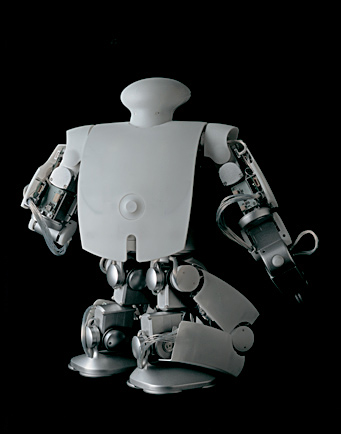
50. Hiroaki Kitano de los sistemas simbióticos de Kitano (Tokio, Japón) que es un subsidiario de Japón Science y de
Technology Corp que alternadamente sea financiada por el gobierno
japonés está construyendo a bebé androide llamado Pino. Pino
tiene 29 motores y está parado cerca de 75 centímetros (30") de alto
y pesa 8 kilogramos. Aquí está un
acoplamiento a un artículo del compartimiento del tiempo.
Un nuevo acoplamiento de Pino que
encontré recientemente. ¡ULULACIÓN! Kitano ahora está dando los diseños
ausentes del software y del hardware que fueron utilizados para Pino. Apenas vaya AQUÍ y firme para arriba.
 Pino - 8KB
Pino - 8KB
Acoplamiento del diseño de los SIG
Acoplamiento del diseño de
PINO. |
| 51. Kitano ahora tiene otro Morph3
llamado androide pequeño. Es 38 centímetros de alto (cerca de 15
pulgadas), tiene 30 DOF y pesa cerca de 2.4 kilogramo = 5.3 libras.
También está utilizando las comunicaciones de Bluetooth.
 
Morph3
|
52. Temprano en octubre de 2001, los sistemas simbióticos de Kitano anunciaron otro proyecto llamado "Morph". Morph utiliza el protocolo de comunicación sin hilos de Bluetooth para pasar comandos al
androide y para enviar la regeneración del androide de nuevo a la
computadora principal. Aquí está otro
artículo. Murata es un correvelador
en este proyecto. Morph tiene 26 DOF y está parado el
cerca de 13.6"(los 35cm) alto. Mi mejor fuente, Gianluca
me envió algunos acoplamientos con los
cuadros.  
|
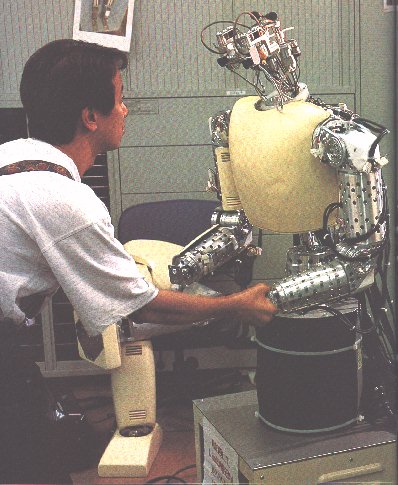
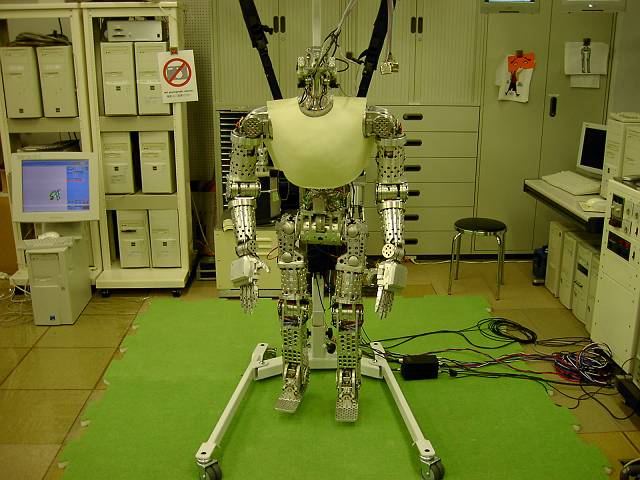
| 53. El laboratorio
electrotécnico en Tsukuba, Japón está
construyendo un humanoid en el laboratorio de la interacción de
Humanoid bajo dirección de profesor Yasuo Kuniyoshi. Su
humanoid se llama Gato, su androide ha costado manera
sobre $1.000.000 - y su alambique no acabado todavía. Ofrecieron a Gato también en el artículo atado
con alambre del compartimiento de este mes acerca de los androides. (sept. de 2000,
pgs 252 - 272). Las piernas son apenas visibles justo en
el fondo. Gordon Cheng acaba de enviarme otro cuadro de
"Gato" y un acoplamiento a un artículo
agradable. Gato tiene 46 DOF.  
|
54. La universidad de Tohoku ahora tiene otro
proyecto llamado "Saika3". Este androide mira el alot como los
androides de Honda. Es el 1.27m alto y el 5 m de par en par y
pesa 47Kg. Saika3
tiene 30
DOF 
Grupo Saika-3
|
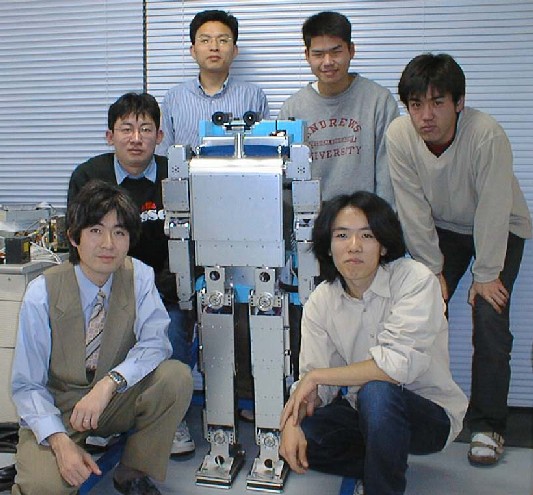
| 55. El laboratorio
del sistema Kougaku de Jouhou en la
universidad de Tokio tiene un nuevo proyecto
llamado H7. Sus otros biped similar a
H6. Otro acoplamiento H7.
(< = nuevo acoplamiento)


H7 es claramente muy similar de tamaño y capacidades a
H6. Tienen un vídeo 18Meg de H7 que caminan en el aeropuerto de
las industrias de Kawada en donde los cuadros antedichos fueron
tomados. |
56. El laboratorio del sistema
Kougaku de Jouhou en la universidad de
Tokio tiene un proyecto llamado H6. Su similar a H5.  
H6 es 1.37 m (4'6") de alto, sobre el 59 m (23") de par
en par, y pesa 55 kilogramos (121 libras). Tiene 35 DOF.
Nota: Saika y H5 se han movido a la página androide histórica de los proyectos. |
| |
|
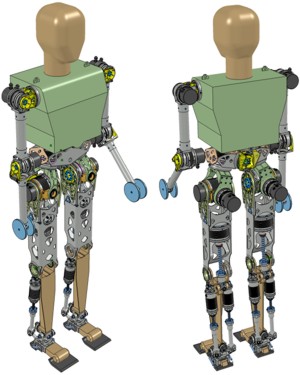
| 57. Ahora hay un segundo proyecto importante en la
universidad técnica de Munich (TUM) - LOLA llamado. Este humanoid tendrá 22 DOF activamente conducido las piernas tener 7 DoFs cada uno, mientras que el
cuerpo superior tiene dos y cada brazo tiene cuatro.
 LOLA LOLA
|
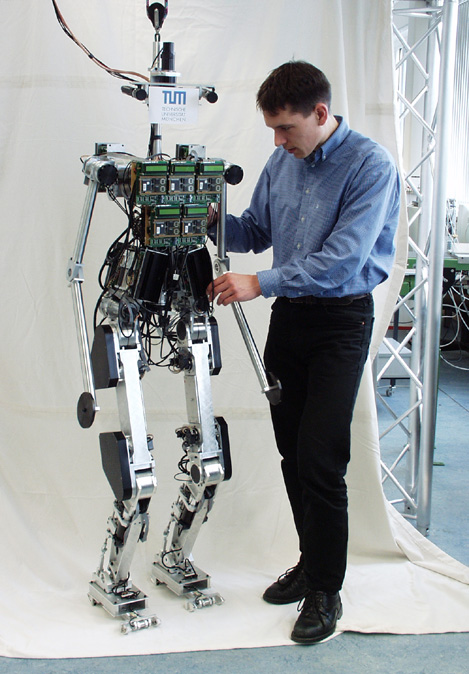
58. Hay un proyecto androide grande que se
enciende en el instituto para los mecánicos aplicados en la
universidad técnica de Munich (TUM).
Su androide se llama "Johnnie" y puede caminar ya. Ahora están intentando
hacer que FUNCIONA. Esto significa que hay dos proyectos
importantes en Munich. Johnnie era en la exhibición en la
Hannover justa este primavera. Tienen dos videos en su sitio. 
|
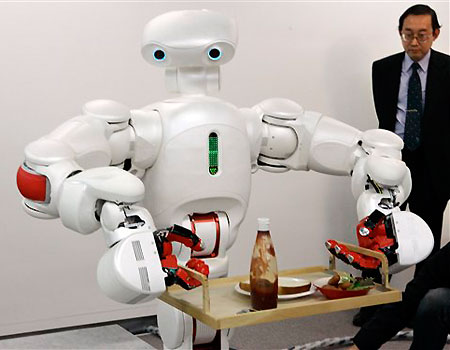
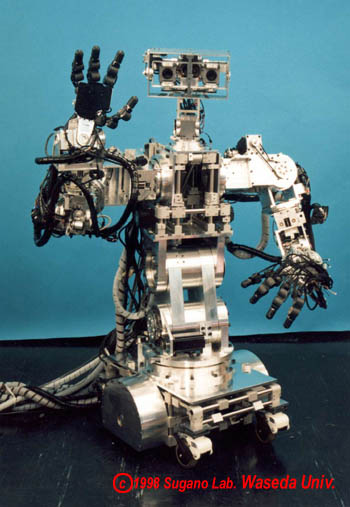
| 59. Aquí está otro proyecto llamado
TwendyOne del
laboratorio de Sugano
en la
universidad de Waseda en Tokio. El avance grande en este
humanoid es sus manos muy sofisticadas con los dedos que tienen
sensores táctiles. El humanoid tiene 47 DOF y coloca 1.47 m de alto
y pesa 111 kilogramos. Tienen unas par de
películas aquí.

Twendy One |
|
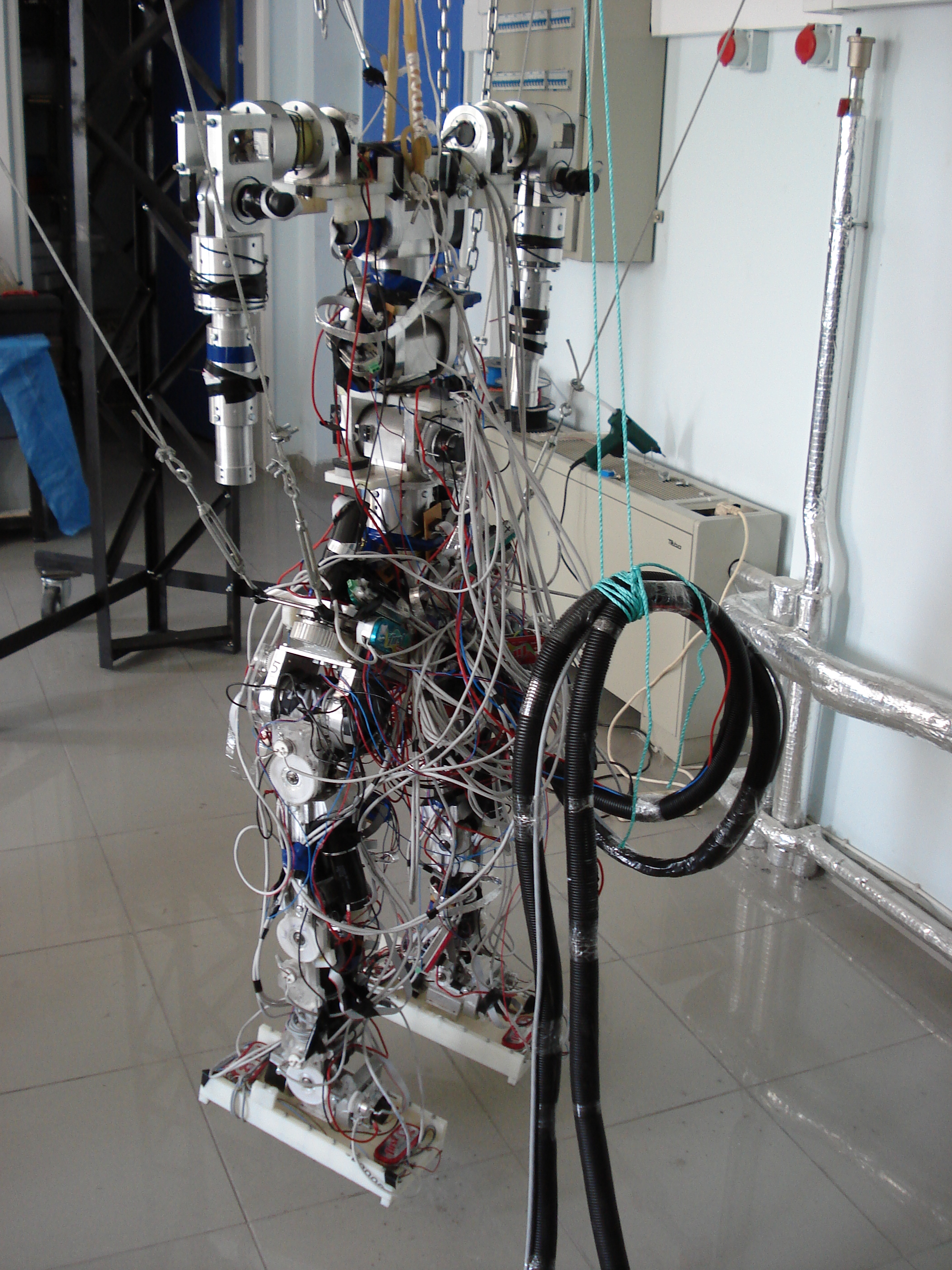
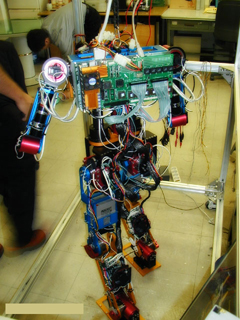
| 60.
Recibí un email del Dr. Davut Akdas. Él ha construido el primer humanoid en
Turquía en la universidad de Balikesir en Turquía del noreste.
Su humanoid se
llama RoboTurk. Tiene un total de 23 DOF incluyendo 12 DOF en las piernas, 5 DOF
en el cuerpo y 2 DOF en los brazos. El peso es 55 kilogramos y la altura es 150
cm. Su humanoid puede caminar adelante, al revés, y de lado. Puede incluso subir
pequeños pasos. ¡Guau! ¡Gran trabajo!


|
61. El profesor Gordon Wyeth y varios de
sus estudiantes ha comenzado un proyecto llamado GuRoo (para grueso Underfunded Roo)
en la universidad de Queensland, en Brisbane, Australia. GuRoo tendrá 23 grados de libertad
y estará parado 1.2 m de alto. Su peso proyectado es 30kg. Guroo
participó en el Robocup reciente 2002 en Japón. El equipo tiene 6 personas.
Uno de los miembros del equipo, Damien Kee, ha fijado algunos videos de su androide que tomaba sus primeras
medidas tentativas. ¡Aseado!

|
| 62. Japón Science y Technology Corp
(Kyoto, Japón) ha revelado recientemente un proyecto de 5 años para construir una
robusteza del humanoid. Este proyecto comenzó en octubre de
1996. El líder de proyecto es el Dr. Mitsuo Kawato y tienen un
personal de cerca de 18. Su robusteza del humanoid se llama DB
(véase abajo).
 Imagen 32KB
Imagen 32KB
|
63. La universidad técnica de Darmstad
en curso ahora tiene un proyecto del humanoid. Su humanoid se llama Lara.
Es 130 centímetros de alto y tiene 18 DOF que consistan en 38 músculos del
alambre de Nitinol. El líder del equipo es profesor Oskar von Stryk y tienen
cerca de 15 estudiantes el trabajar en el proyecto.
 Lara
Lara
|
| 64. El proyecto de la sombra (Londres, Inglaterra) este grupo está
desarrollando una máquina que camina bipedal
del humanoid. También tienen varios
productos para la venta. Su personal incluye a cerca de 14
personas. Debajo está una imagen de su walker bipedal.
 208K
208K |
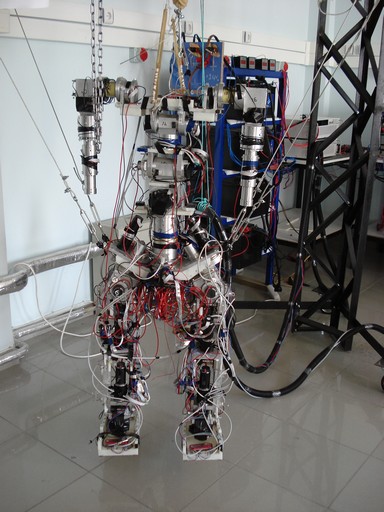
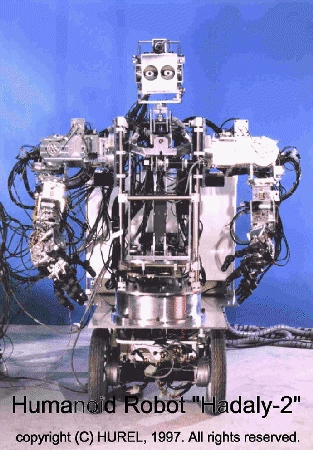
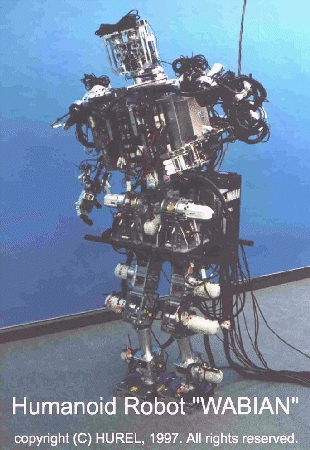
65. El proyecto de Humanoid de
la universidad de Waseda
(Tokio, Japón) su androide es cerca de 6 pies de alto y pesa sobre 600
libras. Puede caminar, pero apenas
apenas. Este androide y el androide de Honda fueron ofrecidos en el
programa de PBS llamado las "robustezas que se levantaban" que
ventilaron tres veces en marcha de 1998. El proyecto de Waseda Humanoid
se compone de seis grupos:
Debajo están las imágenes de Hadalay-2 y de Wabian.


|
| 66. El instituto nacional de la ciencia y de la
tecnología industriales avanzadas en Tokio (AIST) apoya a 15
institutos de investigación a través de Japón incluyendo los 8 en
el norte de la ciudad de la ciencia de Tsukuba de Tokio. Están
patrocinando un proyecto del humanoid que fue comenzado en 1998. Tienen realmente una gran cantidad de proyectos. 

Sobre nosotros vemos que un P3 y a la derecha es las piernas de HRP que aprende caminar.
|
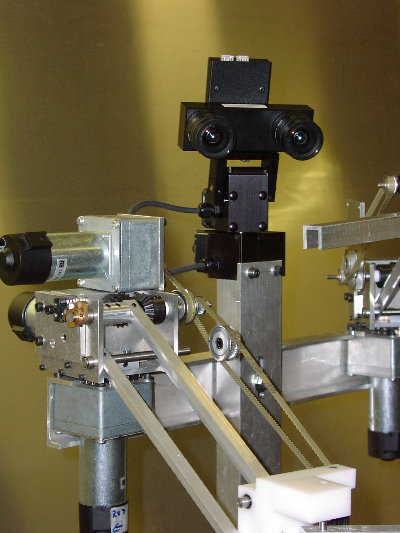
67. La universidad de Chalmers también tiene un proyecto androide a gama completa
llamado Priscilla que fue
comenzado en el verano de 2000. La basan en un esqueleto
clasificado lleno de un ser humano. Los cilindros hidráulicos
la accionará. Usted puede ver que ella tiene visión
binocular.  Priscilla.
Priscilla.
|
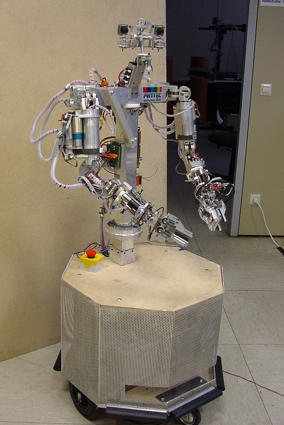
| 68. La universidad de Tokio
tiene un proyecto grande llamado Telesar2.
Consiste en dos sistemas
importantes: 1. El cuerpo superior antropomorfo
con los brazos y la cabeza montó en una torre que rotaba. y 2) un sistema de control que tiene varios monitores y
dos controles de la mano que el operador humano usa en su manos. Esto se parece absolutamente único. Las
manos se parecen ser calidad muy alta. El proyecto es
plomo del Dr. Tadakuma del laboratorio de Tachi de la escuela graduada
de las ciencias y de la tecnología de la información en el Univ de
Tokio. Tienen porciones de videos en su sitio. Exhibieron sus sistemas en la EXPO 2005 del mundo
en AICHI, Japón del de junio 9 al de junio 19 de 2005
 Telesar 2.
Telesar 2.


|
69. El laboratorio en
KAIST en Teajon , Corea del control de
la máquina tiene otro proyecto del humanoid llamado la robusteza de KAIST Humanoid (KHR-1). Este proyecto comenzó en enero de 2002 y ahora
incluye a profesor Junio-Ho Oh y 12
estudiantes. El KHR-1 está parado 1.2 m de
alto y pesa 48 kilogramos. Tiene 21 DOF y puede caminar. Hay videos en su sitio.


|
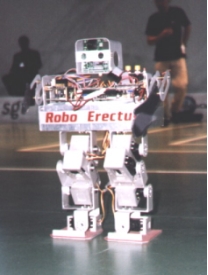
| 70. El ARICC (robótica avanzada y centro de
control inteligente) en la escuela de la ingeniería eléctrica y
electrónica, escuela politécnica de Singapur tiene un proyecto importante del humanoid el ir en cuál él es fútbol del edificio que juega
humanoids. Han construido varios humanoids, el más último de
cuál se llama a Robo-Erectus III. Está parado 50
centímetros de alto y tiene 22 DOF. El proyecto incluye a cerca
de 15 miembros y es plomo de
profesor Changjiu Zhou. 

|
71. La universidad imperial Londres tiene dos proyectos del humanoid. Tienen una mitad superior de un humanoid similar al DIENTE
- Ludwig llamado. También tienen dos humanoids pequeños llamados tirón
y el fracaso que estén parado el cerca de 14"alto. Tienen películas de Ludwig. Los constructores
primarios son: Murray Shanahan, Yiannis Demiris, Dave Randell, y marca Witkowski.


Tirón
Flip & Flop |
| 72. La universidad de Tohoku también tiene un proyecto bipedal de la robusteza que camina. Este proyecto
está bajo dirección de profesor Takashi Emura en el laboratorio de
Emura. Tienen 4 profesores y cerca de 20 estudiantes.
Su meta es construir un humano-tipo robusteza autónoma. Han estado trabajando en el proyecto por por lo menos un
año. Debajo está una imagen de su walker bipedal - Monroe
llamada después de Marilyn Monroe.  Imagen 17KB
Imagen 17KB
|
73. El Politecnico di Torino tiene un proyecto importante del humanoid. Se llama Isaac. El líder es profesor Guiseppe Menga y 7 estudiantes
también están trabajando en el proyecto. Isaac es
cerca de 61 centímetros (24 pulgadas) de alto y pesa cerca de 7
kilogramos (15 libras) que tiene 16 DOF y es conducido por un PC104.
Su humanoid ganó el 2do lugar en el Robocup 2003.
 Isaac y equipo.
Isaac y equipo. |
| 74. Un androide chino fue anunciado de
diciembre el 1 de 2000. Este androide es 1.4
metros (55 pulgadas) de alto y pesa 20kg (44 libras). Fue
construido en la universidad de la ciencia y de la tecnología de
China para la defensa nacional en Changsha, Hunan, China.
Aparently construyeron otra parte posteriora del androide en
1990. Dicen que el "pionero" sabe caminar y hablar en varias
idiomas. Vea sobre el artículo para los detalles.  Pionero (14KB)
Pionero (14KB) |
75. La universidad en Goteburg,
Suecia de Chalmers ahora tiene 3 proyectos.
Tienen el proyecto de Elvis que ahora está trabajando con su segundo prototipo, y un
nuevo Elvina llamado androide que camina pequeño. Su personal es cerca de 13. 

Elvis #2 Elvina |
| 76. Instituto de Tecnología de Massachusetts - el proyecto Cambridge
, masa,
los E.E.U.U. del DIENTE este proyecto está
desarrollando un humanoid también. Su humanoid tiene
una cabeza con cuatro ojos (dos para el cierre ascendente y dos para
la distancia), dos brazos y un torso, pero no tiene ninguna pierna
todavía. Ella tiene dos profesores y
cerca de 7 estudiantes. Ella también demanda a
cerca de 10 alumnos. Los líderes de proyecto son arroyos y Lynn
Stein de Rodney. Algo del mejor pix del DIENTE está en Home Page de los arroyos de Rodney.
Debajo están las imágenes del DIENTE y de un primer de su
cabeza (con 4 ojos). 

|
76b. El laboratorio de la
pierna del MIT ha construido un sistema de piernas
que se piensa para ser casado con el torso del DIENTE pronto.
Las piernas, llamadas el proyecto del M2, se ofrecen en el
artículo atado con alambre del
compartimiento de este mes acerca de los
androides. (sept. de 2000, pgs 252 - 272).  111KB
111KB |
| 77. El MIT tiene un nuevo proyecto llamado Coco. Se supone para
ser del bebé un gorila pequeño o quizás. Tiene 15 DOF y pesa
cerca de 20 libras. El coco es cuadrado del cerca
de 12"(30 centímetros). 
|
78. La universidad nacional de Yokohama tiene un proyecto bipedal de la robusteza
que camina también. Este proyecto
está bajo dirección de profesor Atsuo Kawamura en el laboratorio de
Kawamura. Tienen por lo menos 5 miembros
del personal. Su meta es construir un
humano-tipo robusteza autónoma. Han estado trabajando
en el proyecto por por lo menos un año. Debajo está una imagen
de su walker bipedal.
 Imagen 19KB
Imagen 19KB |
| 79. El laboratorio de Fukuda en la universidad de Nagoya tiene un proyecto llamado el sistema inspirado biológico de la robusteza
(BIRS). Su robusteza aparece ser
cerca de 1.5 m de alto y tiene 20 DOF. Tienen un
personal de cuatro profesores y de cerca de 30
estudiantes que trabajan en él.
|
80. La universidad marítimo de
Corea de Pusan, Corea tiene un proyecto androide
bipedal importante en curso. Parece absolutamente similar a
algunos de los proyectos japoneses tales como el proyecto de la
universidad de Tohoku (véase #20 arriba). Aquí está
el acoplamiento - en coreano o inglés.

|
| 81. Aquí está el primer androide iraní. Se llama Firatelloid
(primero Humanoid inteligente iraní). Tienen algunas
películas en su página multi-media. Los reveladores
principales son Mohamad Shayganfar y Benjamin Fonooni de la universidad de Azad de Arak. (Arak, Irán).
 Firatelloid.
Firatelloid.
|
82. Aquí está el "jinete sin
cabeza" de la compañía de Pangbourne, Reino Unido
de la motocicleta de Castrol. La robusteza fue
construida realmente por Stahle Gmbh de Neuhaussen, Alemania. 
Esta robusteza tiene dos brazos y dos piernas y se monta en la motocicleta.
|
| 83. ¡ El laboratorio en
Linz , Austria de la robótica de Humanoid
ha construido un Barbot - una robusteza
antropomorfa que compra cerveza en la barra y LA BEBE! Éste es el primer humanoid que he visto cuál come o bebe
cualquier cosa. Están tomando sugerencias en cómo
convertir la cerveza en energía de funcionar la robusteza. Es
el 1.7m alto y pesa y 30 kilogramos. Barbot tiene 7 DOF y se
puede reservar para su partido o acontecimiento.
 Barbot - Linz, Austria
Barbot - Linz, Austria
|
84. Los trabajos amórficos de
la robusteza de Munich Alemania han construido un
esqueleto humano móvil que llaman Skelli.
Es el tamaño de un adulto normal y tiene 34
DOF incluyendo 16 en su cara. Un juego avanzado de la
telemetría permitirá que un participante enseñe los comportamientos
de la máquina. Diseñó reflejar concordancia con humankind,
algo de las expresiones que esta máquina del humanoid manifestará es
miedo, cólera, alegría, dolor, sorpresa e impaciencia.
 Skelli con Chico MacMurtrie
Skelli con Chico MacMurtrie
 Detalle del hombro de Skelli.
Detalle del hombro de Skelli.
|
| 85. El proyecto de Humanoid de la
universidad de Waseda tiene otro proyecto llamado
"Wendy". "Wendy" es similar a Halady. Tiene un total de 52
DOF. Guárdese que su texto está en blanco, así que no
imprimirá hacia fuera correctamente - por lo menos en una impresora
de color. Aquí está un cuadro de Wendy.  La imagen es 42K.
La imagen es 42K.
|
86. Ahora la universidad de Waseda tiene otro
proyecto llamado iSHA.
Este humanoid tiene 26 DOF que sean conducidos sobre todo por
los motores eléctricos. Puede funcionar autónomo por 2 horas.
¡ULULACIÓN! ¡Muy impresionante!
 iSHA.
iSHA.
|
| 87. Waseda tiene otro proyecto (que finalmente
encontré) Robita llamado. Se diseña para conducir conversiones con la gente. Ella tiene varias películas en la página de Yosuke Matsusaka.
Este proyecto ha sido activo desde junio de de 1999.
 Robita
Robita
|
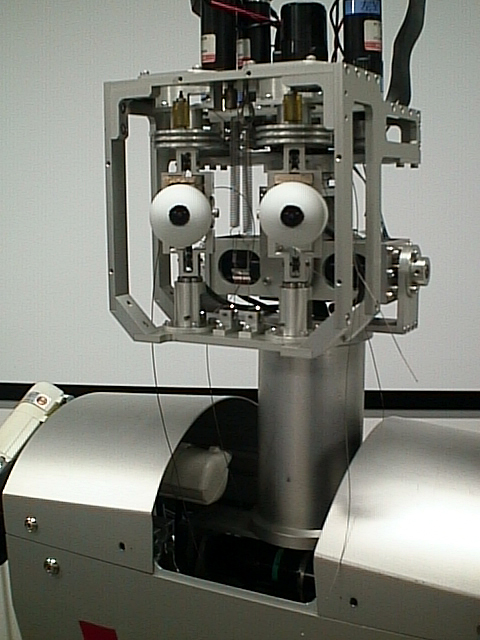
88. La universidad de Waseda también tiene
un proyecto llamado
Wamoeba. Su que es construido en el laboratorio de Sugano.
Se parece que ha habido 3 versiones desde 1995. El cuadro
abajo es el más último - Wamoeba llamado 2Ri.  Wamoeba - 2Ri
Wamoeba - 2Ri |
| 89. Un sistema de la robusteza de Humanoid se está desarrollando en
el centro de investigación inteligente de la robótica
del instituto de Corea de la ciencia y de la tecnología en Seul, Corea.
La meta es construir a humano-como la robusteza autónoma. El nombre de este proyecto es CENTAUR
- después del mitad-caballo
mitad-humano de la mitología griega - y tiene 4 piernas. El
personal actual es 14. El cuadro abajo es la pieza de cuerpo
superior humana. También tienen un proyecto de la
coordinación del ojo de la visión aquí.
(* acoplamientos fijos 09/11/03 *) 

|
90. El laboratorio de la
inteligencia y de los medios de Articifial del instituto de Corea de la ciencia y de la
tecnología ahora tiene dos proyectos debajo del
developement. Tienen el proyecto de la
PUNTERÍA y el proyecto de AIMET. Se
están desarrollando en el campus en Taejon, Corea de
Taejon. Tienen algunos clips video a mirar
también.


APUNTE
AIMET (a la izquierda), PUNTERÍA (centro) |
| 91. La universidad de la Florida tiene un proyecto del humanoid en su laboratorio de la inteligencia de la máquina, Gainsville, la Florida. Su humanoid se
llama Pneuman. Los
profesores incluidos son: Arroyo De Antonio, Michael Nechyba,
Eric Schwartz. Hay también muchos
estudiantes que trabajan en el proyecto. El
humanoid es 59 pulgadas de alto, pesa 102 libras y tiene 25 DOF.
Aquí está otro artículo que encontré.
 Pneuman.
Pneuman. |
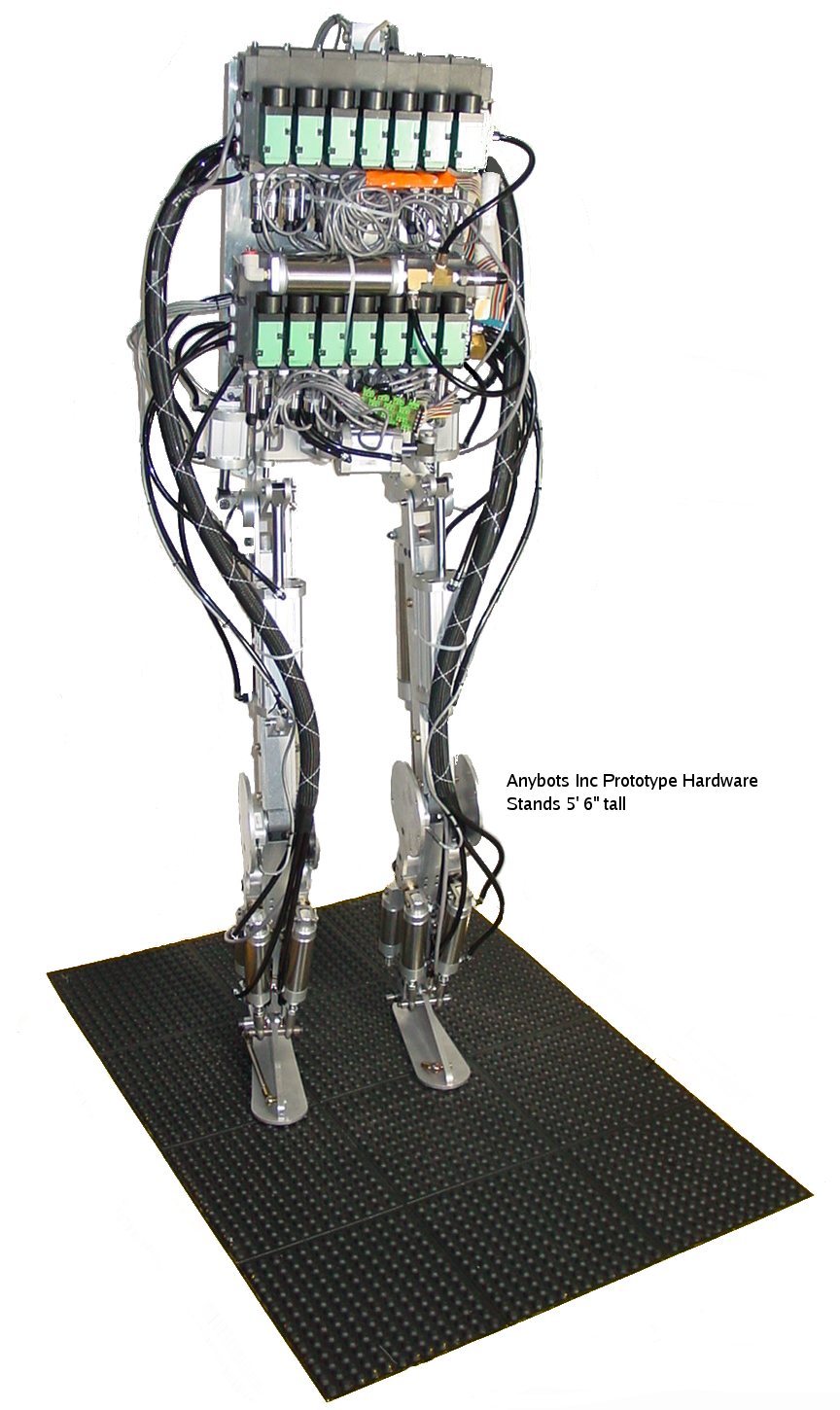
92. Anybots del Mountain
View, California tiene un proyecto a gama completa del humanoid en curso. Aparece que cada pierna tiene 7 DOF. Tienen un vídeo de sus piernas que balancean
verticalmente. También tienen prototipos de manos.

|
| 93. La universidad de Karlsruhe en Alemania tiene
un proyecto grande llamado SFB 588, una
robusteza del humanoid. Su robusteza
no tiene piernas todavía sino que aparece tener manos muy capaces con
cerca de 15 DOF para cada mano. Así el número total
estaría entre 40 y 50 DOF. 
 Manos de Niza.
Manos de Niza.
|
94. El instituto de la ciencia de la medida en la
universidad de Bundeswehr de Munich (Alemania) tiene un proyecto
grande llamado Hermes.
Mis appologies a ellos para no enumerarlos de largo hace.
Este proyecto ha estado yendo desde 1996. El investigador
principal es Rainer Bischoff y hay 7 otros
miembros y cerca de 35 últimos personal y
estudiantes del personal que han trabajado en el
proyecto. Han hecho buen progreso. 
|
| 95. La universidad de Carnegie Mellon (CMU) y la
universidad de Pittsburg comenzaron un proyecto importante llamado el Nursebot, con una
concesión $1.4 millones del National Science Foundation. Esto aparece ser enorme porque tienen tanto como 50 personas que trabajan en varias partes de él. Se parecen tener dos
prototipos: Perla y Florencia. Sus cerca de 4 pies altos.  50 KB 50 KB
|
96. Tamim Asfour, estudiante del grad en la
universidad de Karlsruhe (Alemania), es parte de un proyecto
importante que esté construyendo un humanoid llamado ARMAR. Número del personal:
desconocido a mí. 
ARMAR - 124K
|
| 97. La universidad de Massachusetts en Amherst
tiene un proyecto del humanoid en el
laboratorio para la robótica perceptiva.
Profesor Roderic Grupen es el director. Tienen cuatro profesores en el proyecto y cerca de 20
estudiantes. Han construido la mitad superior de un
humanoid - similar al MIT y a Vanderbilt. Su humanoid tiene
cerca de 29 DOF, incluyendo 2 brazos funcionales (7 DOF cada uno) y dos 3 manos fingered (4 DOF cada uno).
 Humanoid de UMass.
Humanoid de UMass.
|
98. La escuela de la universidad de Vanderbilt de la
ingeniería tiene una robusteza del humanoid llamada ISAC
bajo desarrollo. Este proyecto tiene cuatro profesores y 23 estudiantes.
El proyecto ha estado en curso para la meta actual de cerca de 5
years.Their es permitir a ISAC aprender de sus propias experiencias y
obrar recíprocamente con la gente de una manera natural. En
última instancia, ISAC será un donante del cuidado del en-hogar para
el el mayor o enfermizo. El director del centro para los
sistemas inteligentes es profesor Kawamura. Su personal incluye
Profs. Peters, Wilkes, Biswas, y Gaines.
 Imagen 46KB
Imagen 46KB
|
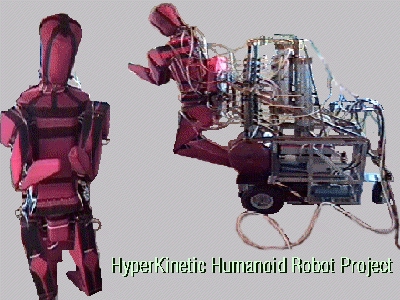
| 99. El proyecto de ProtoAndroid (Austin, Tejas) este proyecto es financiado por el Faustex Systems Corporation, que fundador y presidente es David Santos. Este
proyecto ha estado en el desarrollo desde por lo menos 1992. Es 6' el 4" alto y pesa cerca
de 300 libras. El tamaño del personal es cerca de 5.
También han construido la robusteza
marcial de los artes H2
demostrada abajo.
 116K.
116K. |
100. Tailandia ahora tiene su primer proyecto androide. University de rey Mongkut de la tecnología en
Thonburi está construyendo un androide también. 
|
| 101. Comenzado en 1996, Aandroyds inc. ofrece una línea de
2, 4, y 6 máquinas legged para la venta. Las máquinas se
diseñan para el hogar, la oficina, y la industria, con los modelos de
encargo del laboratorio y del espacio disponibles. Encuéntrelas
en Aandroyds.com. |
102. El Dr. Jennifer Best en UCLA está conduciendo un
nuevo proyecto androide del desarrollo . Su acoplamiento principal de
la tela
puede no trabajar porque su servidor está
abajo. Usted puede ser que intente éste. Con una escuela
importante tenga gusto de UCLA que mueve hacia atrás este proyecto,
yo son seguro que podemos contar con grandes cosas. |
| 103. La universidad nacional de Kumoh de
la tecnología en Seul, Corea tiene un proyecto que
esté construyendo una robusteza miniatura del humanoid. Está
siendo construida por el grupo del mechatronics que es parte del
departamento de la ingeniería industrial. Demandan que su
robusteza del humanoid puede caminar arriba y abajo de las escaleras.
¡ULULACIÓN! Aquí está un par de papeles que encontré. [ 1 ] Y. W. Sung, y S. Y. Yi, "una robusteza
miniatura que puede caminar arriba y abajo de las escaleras", Proc del
humanoid. del simposio internacional sobre Robotics'2001, Seul,
Corea, 2001
[ 2 ] Y. W. Sung, y S. Y. Yi, "el desarrollo de
un sistema miniatura de la robusteza de Humanoid", Proc. del
simposio internacional sobre la robótica y la automatización 2000,
Monterrey, México, pp.133~138, 2000
|
104. La universidad en
Beijing, China de Tsinghua tiene una
robusteza bipedal THBIP-I llamado proyecto del humanoid. Este proyecto es varios años viejos. Aquí está un artículo de las
noticias. Aquí están algunos
papeles que encontré: [ 1 ] "Biped li Liu, Jinsong Wang, Ken Chen, Jiandong Zhao
y Dongchao Yang (universidad de Tsinghua, China) de la robusteza
Humanoid El THBIP-I"
[ 2 ] "planeamiento del paso de la robusteza de
Humanoid basado en Anticipant ZMP Tranck" Dongchao Yang, li Liu,
Jinsong Wang, Ken Chen (universidad de Tsinghua, China)
[ 3 ] "un nuevo método de generación del paso para
una robusteza que camina" Kai Xu, Ken Chen, Jinsong Wang, li Liu,
Dongchao Yang, Jiandong Zhao de Biped
Instituto de la ingeniería de la fabricación,
universidad de Tsinghua, China |
| 105. La tierra inteligente, una
compañía situada en Kirkcaldy, Escocia, ha
anunciado un nuevo proyecto para construir un androide que caminaba y
que hablaba por completo clasificado. El aviso apareció en el extremo de este artículo de las noticias del
BBC.
 Doki Doki
|
106. La universidad de Freiburg en Freiburg, Alemania comenzó un proyecto de las robustezas de Humanoid que
aprendía en enero de 2004. El proyecto, llamado Nimbro, está siendo dirigido por Sven Behnke e
implicará a cerca de 12 personas. Construirán un humanoid que sea cerca de 150 centímetros de alto (5 pies) y pese
cerca de 38 kilogramos. Tendrá 22 DOF. Quisieran competir en el torneo del fútbol de Robocup
Humanoid.
|